你有没有自己的机器人?这是一个非常简单的机器人。在此项目中,我将解释如何使用微控制器设计和构建线路追随者机器人。这线跟随机器人是一个基本的机器人,遵循一条特定宽度的线(通常是浅色表面上的黑线)指示的特定路径。
大纲
线跟随机器人电路原理
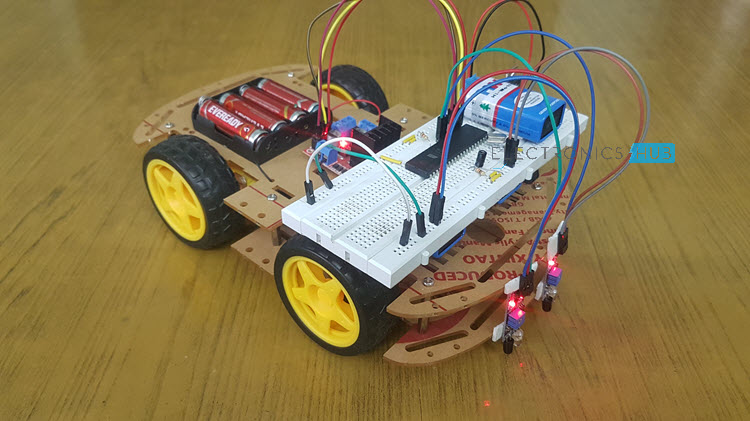
该电路主要由8051微控制器,两个红外传感器,电动机和电动机驱动器IC(嵌入模块中)。线路机器人需要机械装置的机械布置。我使用了4WD丙烯酸底盘。这两个红外传感器安装在机器人的前面,朝向地球朝向地球。
当机器人放在固定路径上时,它通过检测线路遵循路径。机器人运动的方向取决于两个传感器的输出。当两个传感器在路径线上时,机器人向前移动。如果左传感器远离线路,机器人将向右移动。同样,如果右传感器从路径上移开,机器人将朝左移动。每当机器人远离其路径时,IR传感器都会检测到它。
你知道吗遥控间谍机器人电路如何工作?
红外传感器由板上的红外发射器和红外接收器组成。当车辆在黑色线上移动时,红外射线会被黑色表面连续吸收,并且没有反射的射线使输出高。每当机器人移至白色表面时,它就会开始反射IR射线并使输出低。因此,取决于IR传感器微控制器的输出,指示改变其方向的电动机。
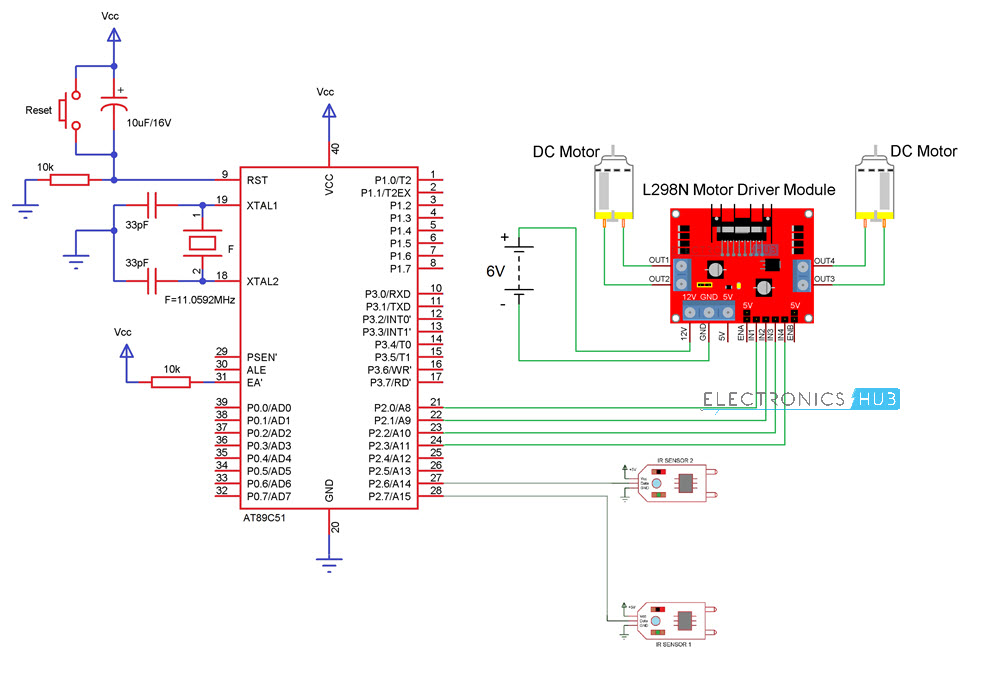
线跟随机器人电路图
电路中的组件
- 8051微控制器
- 8051微控制器的开发委员会(首选)
- 10kΩ电阻x 2
- 10µF电容器
- 11.0592MHz晶体
- 33pf电容器x 2
- 按钮
- 电动机驱动器模块(L298N)
- 机器人底盘带电动机
- IR传感器x 2
如何在机器人之后设计线路?
电路由8051微控制器,IR传感器(带IR发射器和IR接收器),L298N电机驱动器模块,带4个轮子和4个电动机的机器人机箱,电池持有人。
8051微控制器是项目的主要组成部分。它是一个8位微控制器,具有32个可编程I/O引脚。这具有许多外围功能可编程的UART,两个8位计时器/计数器,两个中断,外部内存访问等。
机器人的直流电动机使用电动机IC连接到控制器。由于控制器的输出为最大5V,而电流很小,因此无法驱动电动机。因此,为了扩大该电压电动机驱动器IC。L298N可以驱动36V的电动机,并可以提供3A驱动器电流。
驱动程序IC有15个引脚,通常可在Multiwatt15软件包中使用。这些IC在市场上很容易作为模块提供。电动机驱动器模块的输入连接到port2 Pins P2.0,P2.1,P2.2和P2.3。
两个IR传感器连接到微控制器的P2.6和P2.7引脚。排列底盘,然后将机器人车辆的四个轮子连接到电动机,然后连接到微控制器。
相关文章:DTMF控制的机器人车辆无需使用微控制器
红外传感器的设计
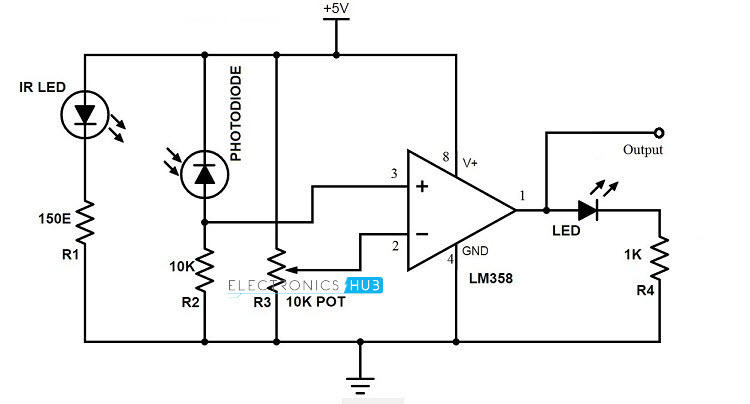
红外传感器电路主要由IR发射器和IR接收器组成。红外发射器与LED相似。其工作电压约为1.4V。因此,为了保护它,将150Ω电阻串联放置,并以正向偏置连接。IR接收器以反向偏置连接,并在VCC和接收器之间放置10kΩ电阻。电阻器和IR接收器之间取出输出。
因为这是一个模拟输出,我们可以将其转换为数字例如,在简单的比较器IC(例如LM358)的帮助下,高和低。该项目中使用的IR传感器模块使用相同的配置,并且电路图如下所示。
IR传感器的工作
IR发射器连续传输IR射线。当红外发射器位于黑色表面上时,这些光线被表面吸收,当它在白色表面上时,这些射线会反射。当未接收IR射线并通过电阻器的VCC流量电压时,IR接收器具有最大电阻。在输出引脚处,电压约为5V。
随着接收器接收到的强度IR射线的增加,电阻值降低,反向分解发生。因此,通过电阻器的电压接地。因此,在输出引脚处将产生0V。
机器人汽车电路的线路工作
- 最初,用黑色胶带在浅色表面上绘制路径。
- 将机器人放在地板上。
- 现在电路上的电源。
- 机器人在指定的路径中移动。
- 当它移出路径时,传感器检查并自动调整机器人。
代码
遵循机器人电路应用程序的线路
- 这可以在驱动器较少的汽车系统中使用,并具有一些添加功能,例如障碍物检测。
- 这也可以用于工业和国防应用。
行追随机器人的局限性
- 线跟随机器人需要2-3英寸的宽线。
- 如果绘制的黑线的强度低,则可能无法正确移动。
- 红外传感器有时也可能吸收周围环境中的红外射线。结果,机器人可能以不当的方式移动。
笔记:如果有人对更多机器人项目感兴趣,请访问页面:机器人项目

14个回应
需要预设5K或10K代替R3和R4,因为所有IR RX都不会产生完美的输出,即使应该校准该输出,都取决于实时的反射表面。
大声笑..如果您使用10K电阻器,IR TX将如何产生IR灯
SOL:使用220欧姆到1k欧姆的范围。代替R1和R3…
L293D不会放大任何电压。.它仅充当电动机向前和电流反向流动的控制单元,以使其向后或向前方向旋转。但是它可以站立至36V的电压,没有任何问题最大电流为每个电动机600毫升。推荐的额定值为400-450毫米,甚至12-18伏
Suggetion:Adimins PLS在某些基础上至少进行一些校正。.如此多的人只是关注您……最终的结果可能会失败
请给我发送组件列表,以使用Atmega 8带有障碍物检测器制作LFR
您可以使用上述组件同时制作线路和障碍检测器机器人。在执行障碍探测器机器人更改代码和红外传感器位置时
先生,我想用Multisensores遵循一条线路,以便以准确的速度提高速度。那么它是如何制作的?
先生,请给我适当的电路图,以制作IR电路以进行对象检测
请给我发送组件列表,以使用Atmega 8带有障碍物检测器制作LFR
Arduino Keil 8051
我需要金属探测器PLZ电路
您能提供fritzing电路图吗
嘿,如何获得开发委员会和IR模块
先生,我可以获取您的项目代码吗?
请给我寄给我的组件列表
我们在同一页面上提到的必需组件。
格罗夫 - 线查找器v1.1。