大纲
介绍
步进电动机驱动器是电路或设备,可为步进电机提供必要的电流和电压,从而使其具有光滑的操作。步进电动机是一种直流电动机,可旋转台阶。
简单的直流电动机和步进电动机之间的主要区别在于,通过步进电动机,我们可以在数字控制的帮助下实现精确的定位。
步进电机通过从控制器中同步脉冲信号来精确旋转,该脉冲信号是通过驾驶员给出的。步进电动机驱动器是从控制器中取出脉冲信号并将其转换为步进运动运动的电路。



在这个项目中,我们使用555个计时器IC(充当控制器),CD4017十年计数器(充当驱动器)以及其他几个组件设计了一个简单的12V步进电动机驱动器电路。
电路原理图

需要组件
- 555计时器IC
- CD4017约翰逊十年柜台(10个解码输出)
- 4 x 2N2222 NPN晶体管
- 4 x 1N4007 PN连接二极管
- 4 x1kΩ电阻(1/4瓦)
- 2.2kΩ电阻(1/4瓦)
- 470Ω电阻(1/4瓦)
- 100kΩ电位器(旋钮类型)
- 100 PF陶瓷盘电容器(代码 - 101)(也为0.1 NF)
- 1µF 16V极化电容器
- 12V步进电动机(单极 - 5线)
- 连接电线
- 面包板(原型板)
- 12V电源
组件描述
555计时器IC
IC 555是一个非常著名的计时器IC,通常用于时间延迟,脉冲产生和许多振荡器应用。IC 555具有三种操作模式,即可观的多振荡器(脉冲发生器),单稳定的多振动器(时间延迟)和双晶振总器(翻转 - 拖失板)。在此项目中,我们使用了此555 IC来生成脉冲,即以不可分割的操作方式。
CD4017十年计数器IC
CD4017是一个反构成IC,可产生10个解码的输出,因此有十年的计数器。这些计数器通常用于显示器,频分部操作,二进制计数器等。
但是在这个项目中,我们将CD4017计数器IC用作步进电动机驱动器。因此,此步进电机驱动器电路本质上是二进制计数器电路。
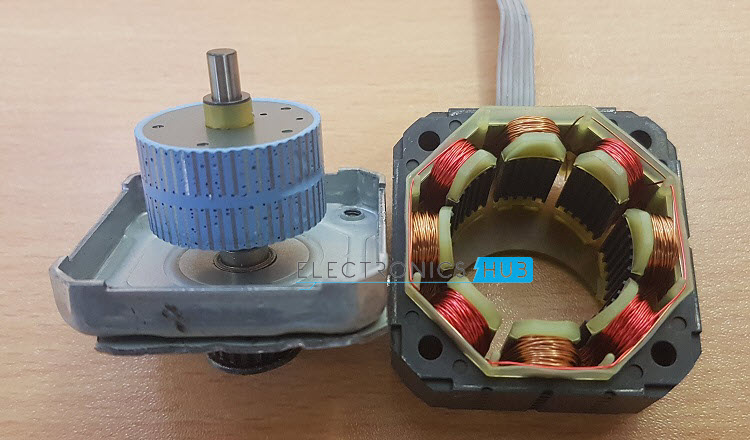
步进电机
该项目使用了12V步进电机。这是一个单极型步进电动机,具有5 - 电线配置。基本上,根据定子的绕组,将步进电动机分类为单极步进电动机和双极步进电动机。下图显示了带有绕组的双极步进电动机。
可以在少数晶体管或uln2003(例如ULN2003)的帮助下构建单极步进电动机的驾驶员电路。
但是,双极步进电动机的驾驶员电路需要H - 桥式类型连接。因此,我们使用H - 像L293D这样的桥梁IC驱动双极步进电动机。
电路设计
我们将从方波发电机(即以不可分割的模式下的555 IC)开始。在555(引脚7)的VCC和放电引脚之间连接了2.2kΩ电阻。
100kΩ电位器连接在放电引脚(引脚7)和阈值引脚(引脚6)之间,依次用触发引脚短短(引脚2)。
1 µF电容器在触发引脚(引脚2)和GND之间连接。100 PF的旁路电容器在控制电压引脚处连接(引脚5)。其他引脚即VCC(引脚8)连接到12V电源,重置引脚(引脚4)至12V供应和接地引脚(引脚1)到GND。
555定时器IC的输出,即引脚3作为CD4017计数器IC的时钟输入,即至其第14引脚。CD4017的VDD和VSS引脚,即引脚16和8分别连接到12V供应和GND。启用引脚(引脚13)连接到地面。
我们需要控制步进电动机中两个线圈的4个线圈端子。因此,我们只需要驱动程序的4个输出。这些输出分别为Q0至Q3,即销钉3、2、4和7。计数器的输出通过单独的1kΩ电阻连接到4个晶体管的基本端子。
计数器必须在第五个脉冲上重置,因此Q4(引脚10)除了第五次输出外,它连接到CD4017的重置引脚,即引脚15,并且该引脚通过470Ω电阻连接到GND。
步进电动机是5线配置的单极型。中心引脚内部短路并连接到电源(这里为12V)。
步进电动机的其他四个端子是两个线圈的末端。它们必须连接到四个晶体管的收集器终端。
重要的是要以输出的启动序列连接。最后,在收集器终端和供应之间连接了四个二极管。二极管非常重要,因为它们将保护晶体管免受电感尖峰。
步进运动驱动器电路的工作
该步进电机驱动器电路的工作非常简单。我们将看到一步 - 逐步工作解释。首先,将555个计时器IC配置为不可分割的多振总器,即它是方波发生器。
根据电位计的位置,方波的频率在7 Hz至340 Hz之间变化。
该方波是将CD4017计数器IC作为其时钟输入的。对于时钟信号的每一个正换个过渡,即低至高过渡,计数器输出逐渐进展为一个计数。
对于时钟上的第一个正转换,Q0将很高,对于第二个正转换,Q1将很高,依此类推。
由于我们只需要4个输出,因此第五输出即Q4连接到RESET引脚,以便计数器将重置并再次开始计数。
计数器IC CD4017的输出给了4个不同的晶体管,这些晶体管又连接到步进电动机的4个线圈端子。从下图中,我们可以更好地理解。
 假设点A,B,C和D是连接到晶体管的线圈的接触。步进电动机中的常见电线用于12V电源。
假设点A,B,C和D是连接到晶体管的线圈的接触。步进电动机中的常见电线用于12V电源。
当将第一个时钟信号应用于CD4017时,Q0变为高。这将打开相应的晶体管。
结果,普通电线的供应通过点A到地面。这将使线圈充满电并充当电磁体。转子将被吸引并转向该位置。
在第二个时钟脉冲期间,输出Q1变高,因此,与之关联的晶体管被打开。现在,电流从普通线到GND流到点。
因此,该线圈将被通电并转向电磁体。这将进一步旋转转子。此过程继续并取决于时钟信号的频率,步进电动机的旋转速度会有所不同。
优点
- 此处设计的DIY类型步进电动机驱动器可以驱动单极步进电动机。
- 通过使用此步进电机驱动器,我们可以避免昂贵的踩踏运动驾驶员板。
缺点
- 这种设计不是一个有效的设计。
- 需要大量的小型应用程序。

3个回应
您好委内瑞拉。我可以使用六线单极电机吗?如何?谢谢!
是的,通过找到两条普通电线并将它们都连接到12V。
步进电机是永久磁铁还是可变的不情愿?