在本教程中,我们将学习如何使用Raspberry Pi Pico的串行端口并显示一些文本。仅当您使用官方SDK编程C中的Raspberry PI Pico时,才适用本教程。我们将学习Raspberry Pi PICo串行编程和打印'Hello,World!'文本的所有必要步骤。
大纲
关于覆盆子PI Pico串口的简要说明
使用Raspberry PI Pico闪烁LED后,下一个逻辑步骤是使用串口并打印一些文本,如Hello World。这里的重要点不是通过串行端口打印的文本,而是raspberry pi pico将数据传输到串行端口的过程。
关于Raspberry Pi Pico串行C SDK的美丽事情是它定义了“STDIO”样式功能,如“PrintF”,供我们使用。
在继续编程Raspberry Pi Pico串口之前,我们必须了解Raspberry Pi PICo的串行输入和输出一点。Raspberry Pi Pico的串行输入和输出可以是UART或USB CDC。
Raspberry Pi Pico有两个UART外围设备:UART0和UART1。当您使用“PrintF”功能打印数据时,默认串行端口是UART,在该UART0外设中使用。
笔记:Pico SDK有一个名为'pico.h'的板配置文件,它将一些重要的引脚设置为默认的不同操作,如UART,车载LED,i2C,SPI等
根据该板配置文件,UART0是默认的UART外设,默认的UART0_TX引脚是GPIO 0(GP0),UART0_RX引脚是GPIO 1(GP1)。查看Raspberry Pi Pico的引脚,在“开始使用Raspberry PI PICo”教程中的所有可能的GPIO引脚中,可以配置为UART0或UART1引脚。
探索你好世界例
随着覆盆子PI PICO的串行编程简介,让我们继续探索串行输出的示例。在继续前进之前,如果您没有使用C SDK编程Raspberry PI Pico的初始设置,那么我强烈建议您将前一个名为“编程Raspberry Pi Pico与C”的教程引用。
在该教程中,我讨论了设置Raspberry PI的所有必要步骤(这是Raspberry PI计算机而不是Pico),如下载工具,SDK,示例和编程Pico与Blinky示例。
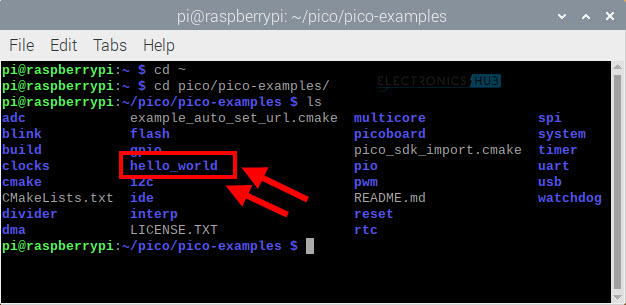
在“pico-ilmustres”目录(IN / home / pi / pico)中,您可以看到组织成多个目录的所有示例的列表。在上一个教程中,我们探索了“闪烁”目录(以及相应的源文件)。
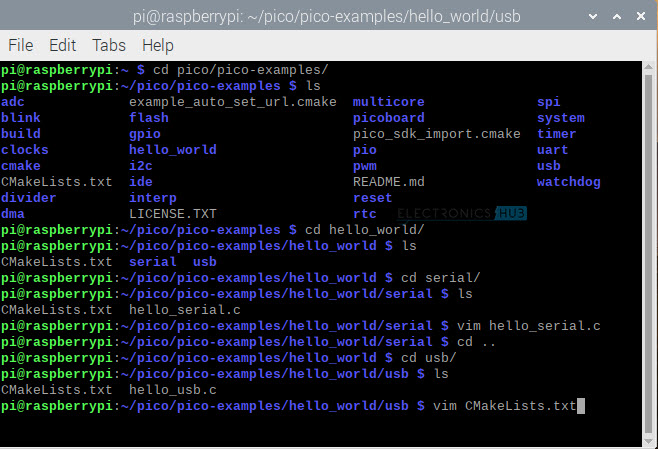
如果您通过目录列表,则存在一个名为“hello_world”的目录。此目录包含串口编程的示例项目。
更改为“hello_world”目录并列出其内容。您可以看到它包含两个名为“串行”和“USB”的目录。如果要通过UART端口串行通信,请在“串行”目录中使用该项目。如果要使用raspberry pi pico的USB串行选项,则转到“USB”目录。
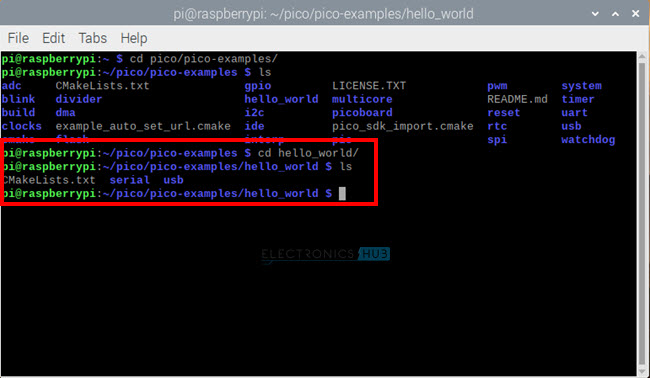
首先,我们将在“串行”目录中看到该项目,在执行时,通过覆盆子PI Pico的UART打印“Hello,World!”。更改为“串行”目录并列出内容。您可以在此目录中看到两个名为'cmakelists.txt'的文件和'hello_serial.c'中的两个文件。
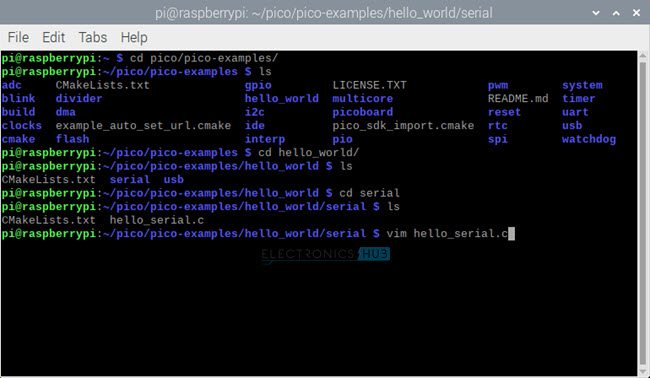
要查看“hello_serial.c”的源代码,可以在以下命令的帮助下使用Vim。
供您参考,我在下面复制了代码。
笔记:退出Vim,键入':q'。
代码非常简单。经过一些硬件初始化(对于UART或USB),程序打印“Hello,World!”文本,延迟1000毫秒。如果您注意到代码,则无法指定是否使用UART或USB。它的原因在CMake中配置。
使用CMake指令,我们可以将串行输出设置为UART或USB CDC(或两者)。事实上,如果您在“hello_world”目录中打开'USB'目录,您可以看到两个文件:'cmakelists.txt'和'hello_usb.c'。'hello_usb.c'的内容与'hello_serial.c'完全相同。
差异位于每个目录中的相应的“cmakelists.txt”文件中。在不修改源代码的情况下,只需通过配置“CMAKELISTS.TXT”文件,基本上可以将UART或USB作为串行输出。
探索Cmakelists文件
在'hello_world'目录的“串行”目录中,使用Vim打开“CMAKELIST.TXT”文件。我复制了“cmakelists.txt”的内容以供参考。
由于SDK中的默认配置是使用UART0作为串行端口,因此此“CMAKELISTS.TXT”文件中没有任何重要意义。如果要查看启用和/或禁用UART和USB的实际CMake指令,那么我们必须在“Hello_World”目录的“USB”目录中查看“CMAKELIST.TXT”文件。
假设您位于“Hello_World”目录的“串行”目录中,请使用以下命令转到“USB”目录并在“USB”目录中打开“CMAKELIST.TXT”文件。
我将“CMAKELIST.TXT”的内容复制为“USB”目录中的“USB”目录中的参考。
此文件中有两行有助于将串行输出设置为UART或USB。他们是:
这些线路将通过USB启用PrintF输出,并通过UART禁用Printf输出。
笔记:在未来的项目中,如果要通过USB启用“PrintF”输出,则必须在该项目的相应的“Cmakelists.txt”文件中包含这些行。
建立你好世界榜样
既然我们已经了解如何配置CMake以将输出设置为UART或USB,让我们继续构建“Hello_World”目录中的项目。如果您记得“闪烁”项目,构建过程是相同的。
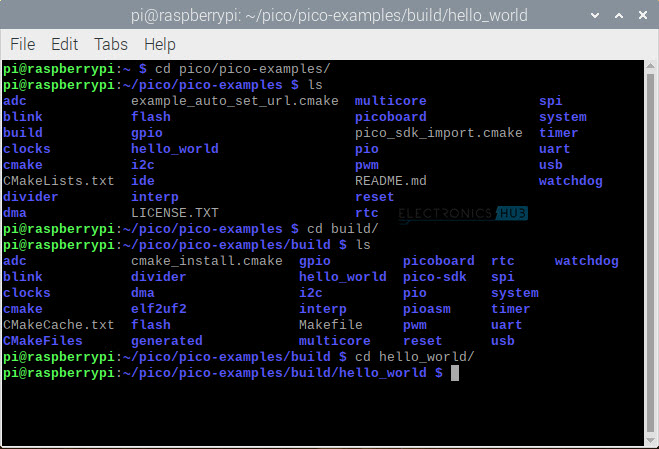
在“pico-mixime”的目录中以及将其更改为“Hello_World”目录中的“构建”目录。
使用make命令启动构建过程。可选地,您还可以使用-j选项指定并行作业的数量。
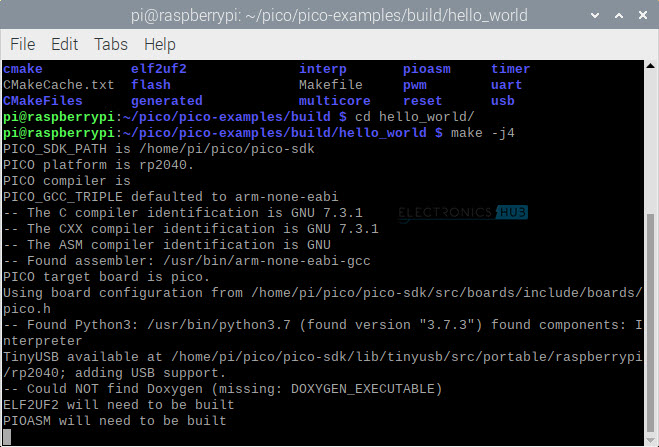
完成构建需要几秒钟。这将在“hello_world”目录“序列”和“USB”中构建示例。
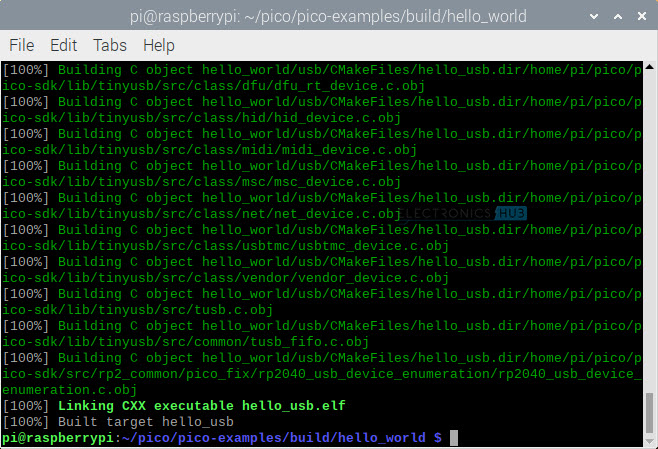
要查看生成的文件列表,请更改为单个项目的构建目录。例如,让我们看看为“USB”示例生成的文件。
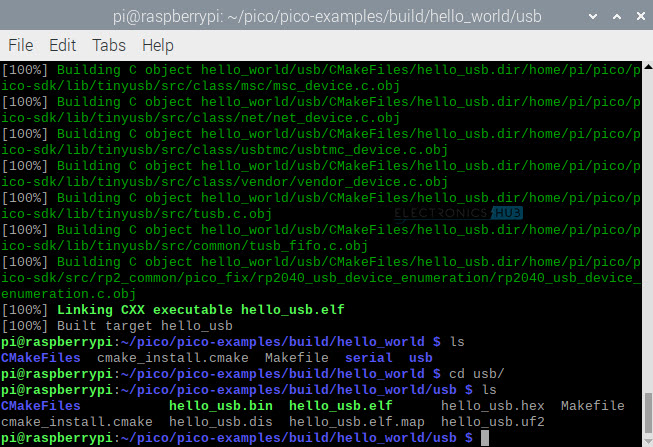
您可以看到“USB”示例项目的以下四个目标文件:
- hello_usb.bin.
- hello_usb.elf.
- hello_usb.hex.
- hello_usb.uf2.
同样,“串行”项目也包含“/微微/微微示例/ build / hello_world / serial'目录中的四个目标文件。
- hello_serial.bin.
- hello_serial.elf.
- hello_serial.hex.
- hello_serial.uf2.
闪蒸覆盆子pi pico
我们将使用USB示例,因为查看串行输出更方便。我已经讨论了如何在上一个教程中将程序上传到Raspberry Pi Pico。伟德老虎机手机版但作为提醒,我将简要介绍一次步骤。
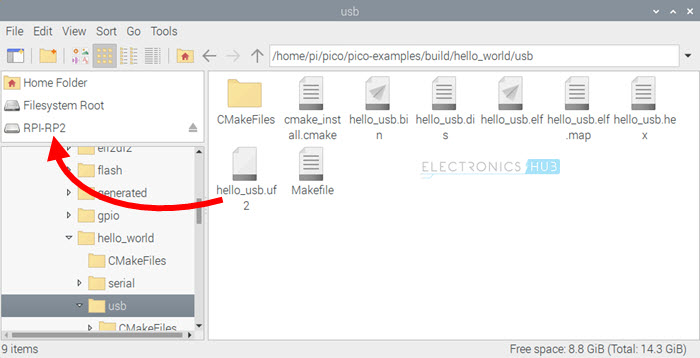
在将Raspberry Pi Pico中插入主机(在我的情况下覆盆子PI)时握住“Bootsel”按钮。这将使Raspberry Pi PICo显示为可移动存储设备,称为RPI-RP2。
我还解释了一个简单的技巧来添加一个按钮来重置raspberry pi pico,这消除了每次想要上传程序时拔掉拔出和重新插入的必要性。
浏览到Hello World USB项目构建目录(Home / Pi / Pico / Pico-emplice / Builds / Hello_World / USB)并将“Hello_USB.uf2”文件拖放到RPI-RP2设备中。raspberry pi pico重新启动并开始执行代码。
如何查看USB输出?
我们知道在闪烁覆盆子PI Pico后,它开始运行程序。但是如何查看USB的输出?我们必须使用一个名为'minicom'的特殊工具。要安装'minicom',请使用终端中的以下命令。
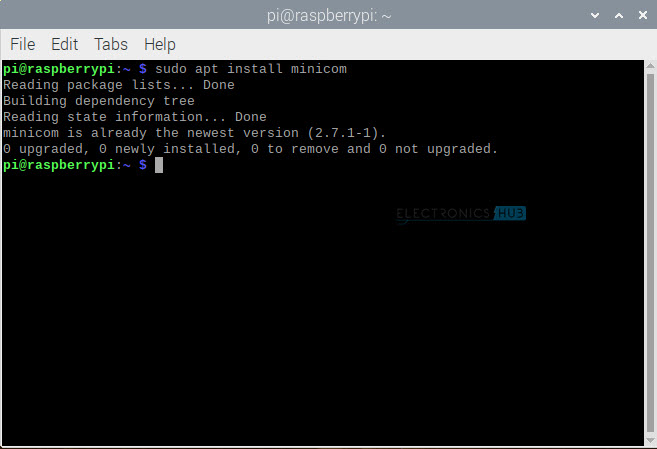
我的电脑(Raspberry Pi)已经安装了Minicom。
要打开串行端口,请在终端中键入以下命令:
一旦您击中ENTER,MINIOM将打开具有115200的波特率的串行端口,您可以看到'Hello,World!'不断打印。
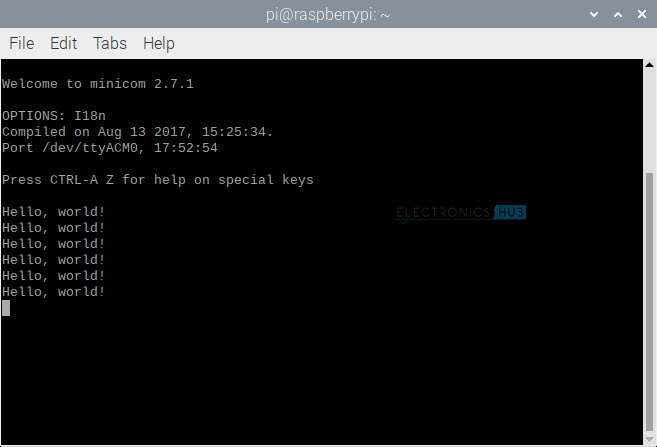
要退出Minicom,请按Ctrl + A,然后按x。
笔记:我没有讨论如何通过UART of Raspberry PI Pico查看输出,因为使用USB非常简单。但是,如果您也对此感兴趣,那么我将在Raspberry Pi Pico的UART上的串行输出中使用新部分更新本教程。
结论
覆盆子PI PICO串口编程的完整教程在此处解释。您学习了如何配置Raspberry PI PICo以生成串行输出,如何使用CMake将串行输出指向UART或USB,安装必要的工具,最后查看通过USB打印的Printf输出。
