机械臂是机器人界流行的概念之一。机械臂在工业中非常常见,它们主要用于制造工厂的装配线上。
对于初学者来说,首先想到的是构造机械臂是一个复杂的过程,涉及复杂的编程。甚至我们的想法在一开始是一样的,一旦我们把全部注意力放在事情上,我们发现它很容易,只需要一些时间和修补。
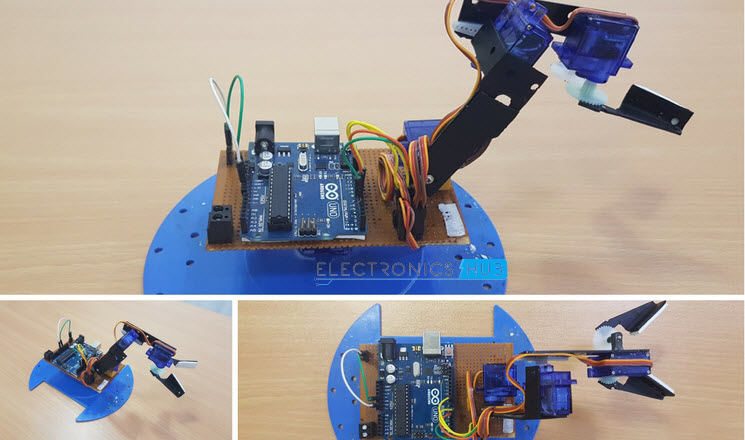
在这个项目中,我们制作了一个简单的机械臂,它是完全自动化的,可以完成某些任务。除了微控制器(我们使用了Arduino UNO)和伺服电机,手臂的所有其他组件都是从办公室废料中收集来的(大部分)。
这就是说,我们可以用我们身边的东西来制造一个机械臂,而不需要预先设计的部件或3D打印的部件。
我们将看到机械臂的一步一步的构造。在这个项目中所做的结构和在这个博客中演示的是根据我们的方便,只是给读者一个想法。如果您计划构建一个,则不必遵循完全相同的步骤。
首先,我们将看到这个项目的电路图。下图显示了机械臂所需的电路。电路其实很简单,只涉及Arduino和4个伺服。但与实际电路本身相比,其结构要复杂得多。
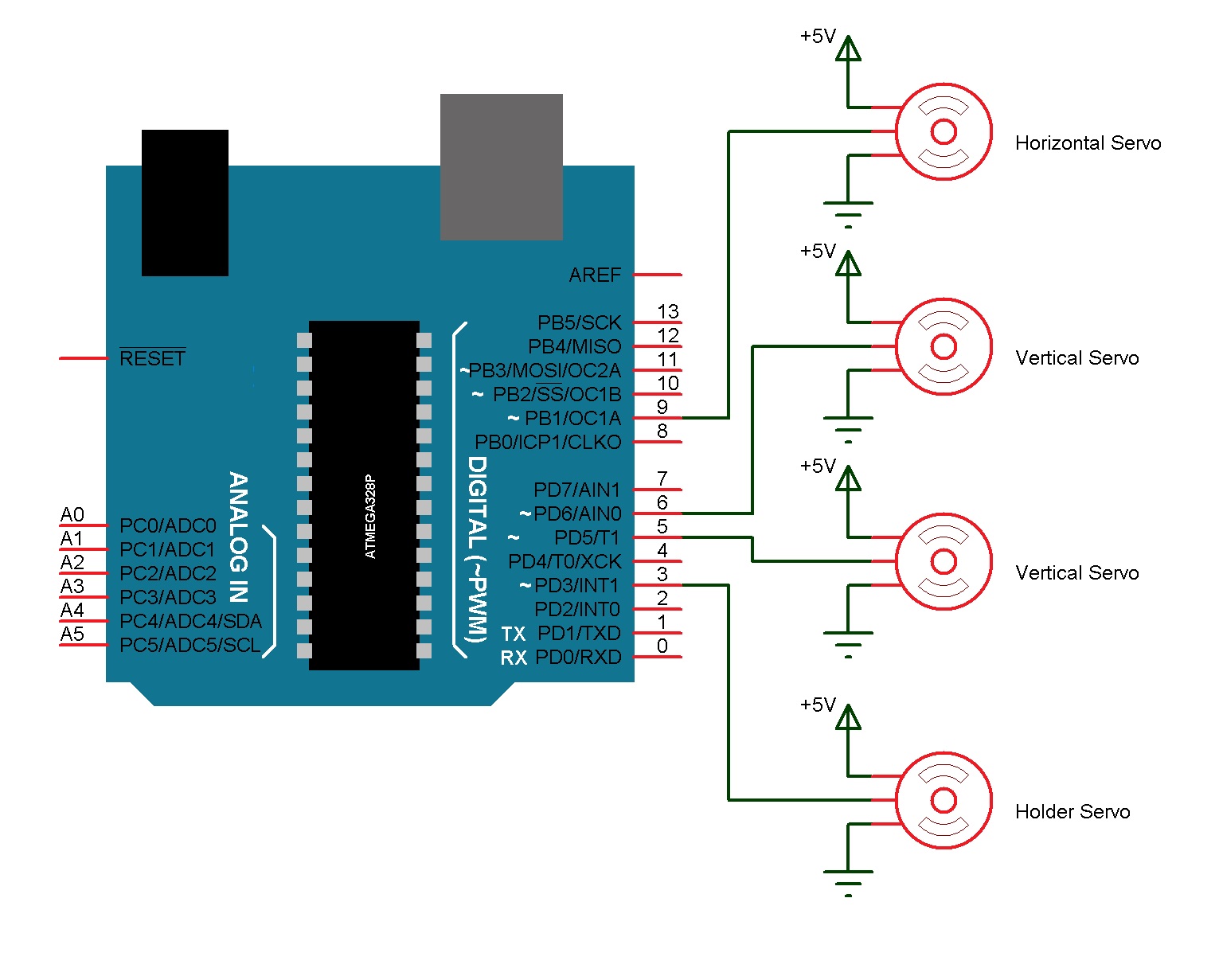
注意:伺服系统的电源不能来自Arduino。必须使用单独的5V调节电源。
每个伺服器的控制引脚必须连接到Arduino的PWM引脚。我们将制造一个自动机械臂,因此我们不需要任何电位器。现在我们已经看了简单的电路图,我们将跳到实际的构造。
大纲
输出视频
建设
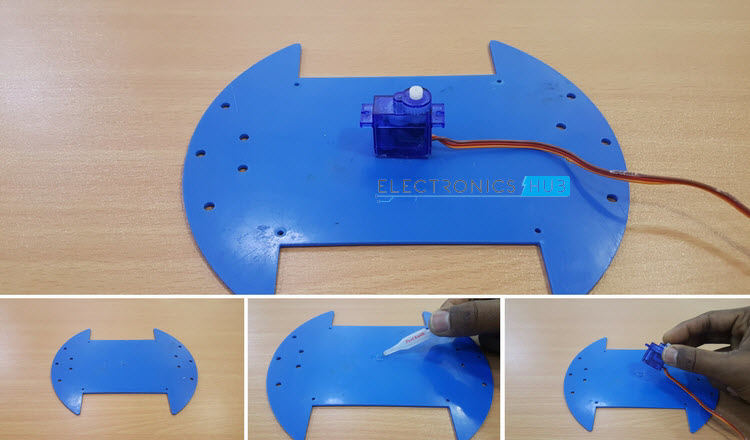
步骤1
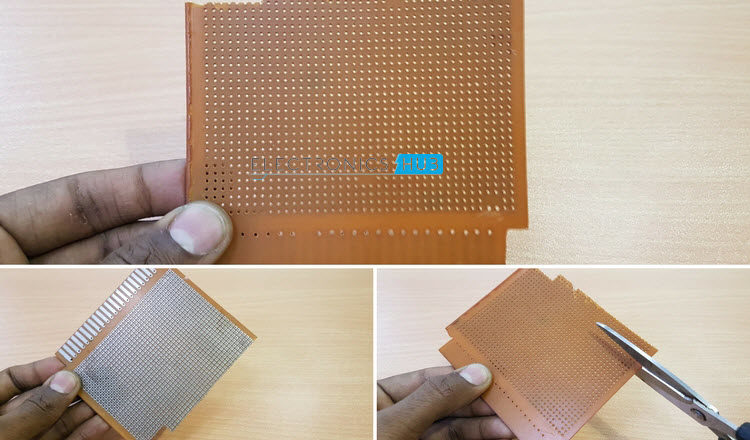
- 取一块大约11厘米x 7厘米尺寸的零板。我们将用这个板做一些电气连接,也固定Arduino板和第二个垂直伺服。
- 把纸板上不需要的部分剪掉,按照上面提到的尺寸塑形。
步骤2
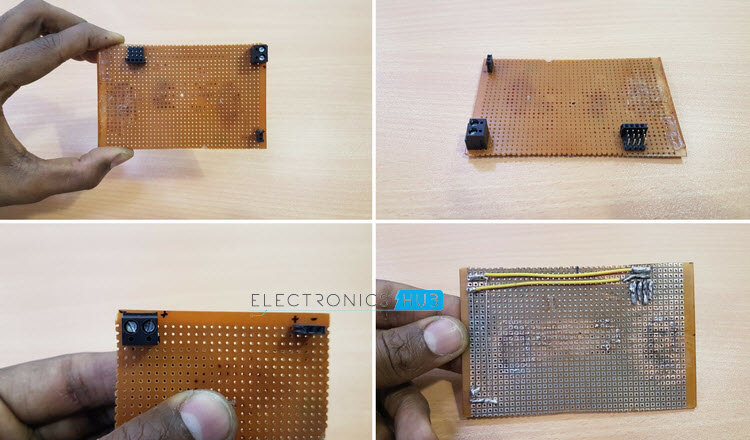
- 现在我们需要连接电源和伺服控制信号的端子。为此,我们将使用2针螺钉端子,2针母头销和一组公头销和母头销。连接器的位置要有足够的空间来放置Arduino。
- 电气连接,即5V连接和GND连接在板后焊接。
- 确保焊接小心,没有短路。
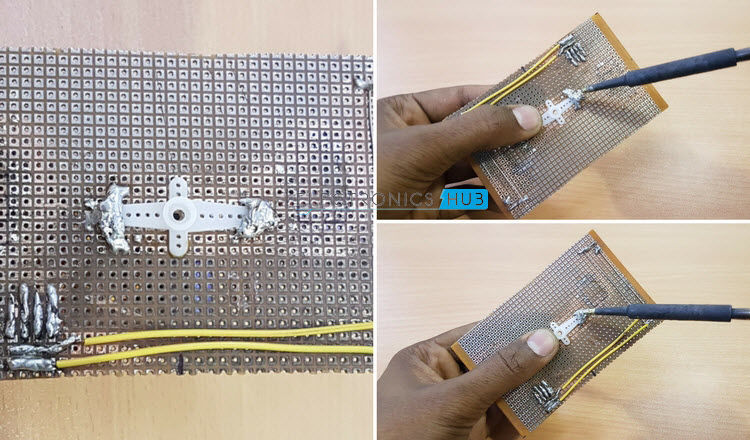
步骤3
- 胶水伺服喇叭到背面的板,在右边的中心。这个喇叭稍后将连接到水平伺服。
- 伺服喇叭有一个孔,它可以固定在伺服电机上。但是我们需要钻一个孔通过板螺丝伺服板。
- 为了钻孔,我们使用了从一台旧打印机中找到的高扭矩电机。
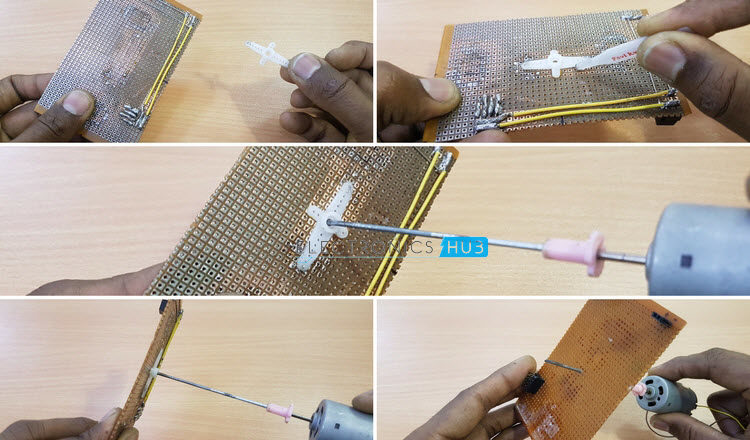
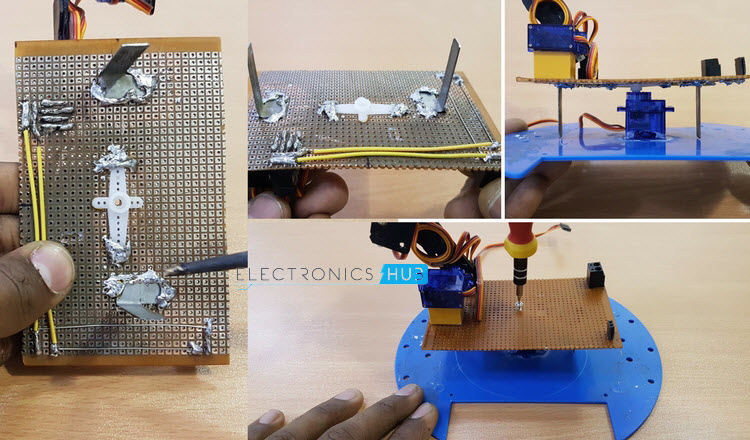
步骤4
- 为了使伺服喇叭牢固地固定在板上,我们在伺服喇叭的臂上焊接了一些引线到板上。
- 这一步只是预防措施,以确保伺服喇叭旋动后不会浮在空气中。
- 这一步完成了项目的板部分。从下一步开始,我们将开始构建机器人的主要手臂部分。
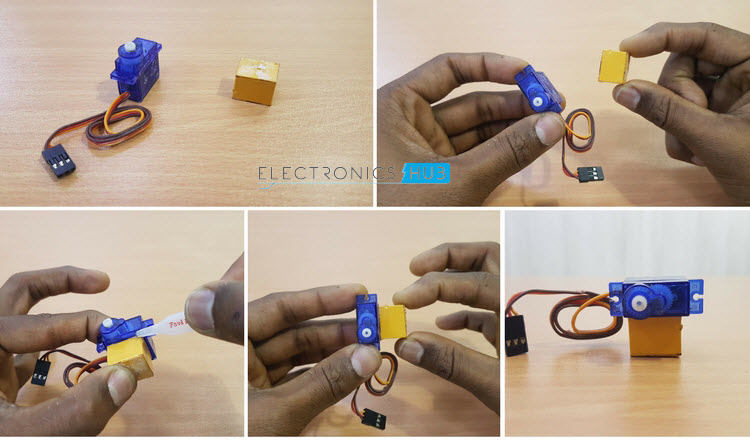
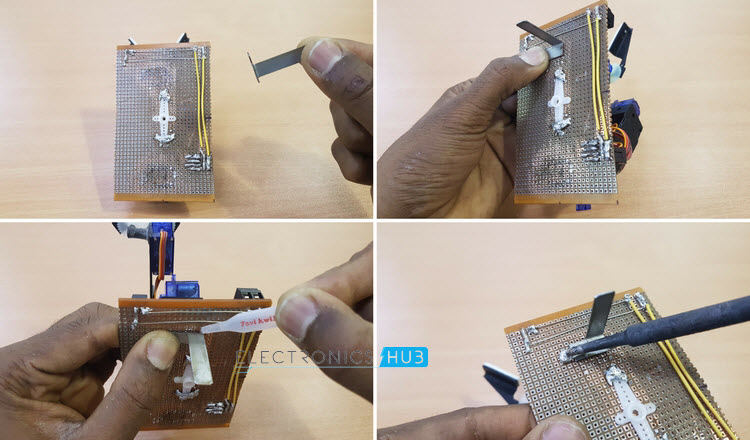
步骤5
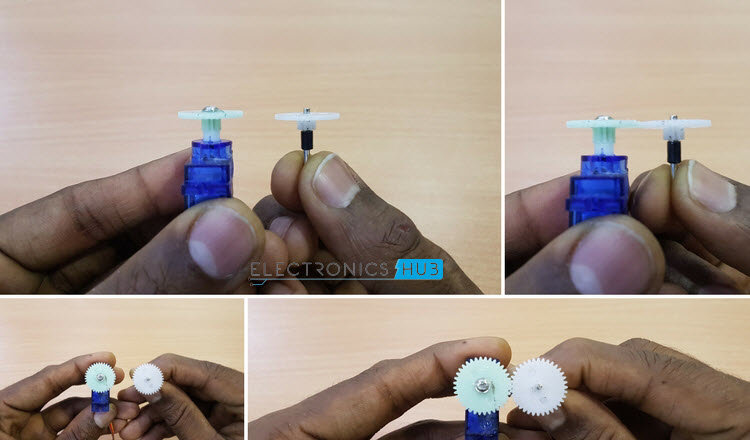
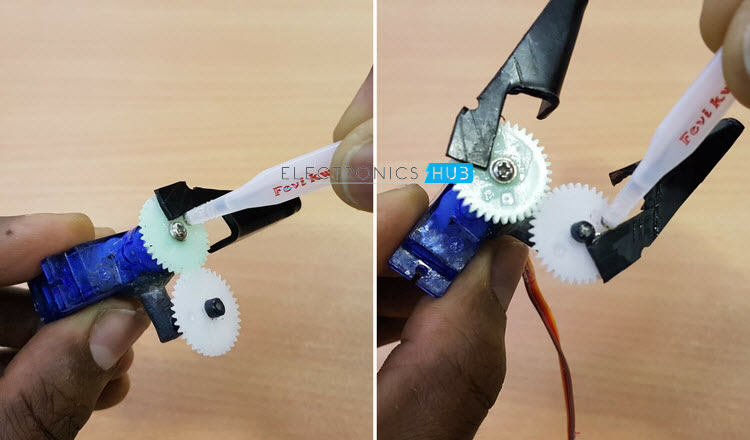
- 首先,我们将从支架伺服开始,这个伺服实际容纳物体。为此,我们将使用一些齿轮。
- 选择两个齿数相等且相似的齿轮,将其中一个齿轮拧到伺服的输出花键上。确保齿轮固定在伺服装置上。

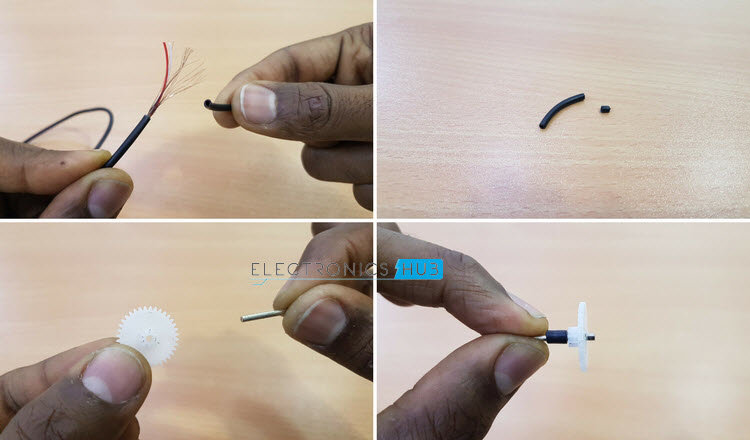
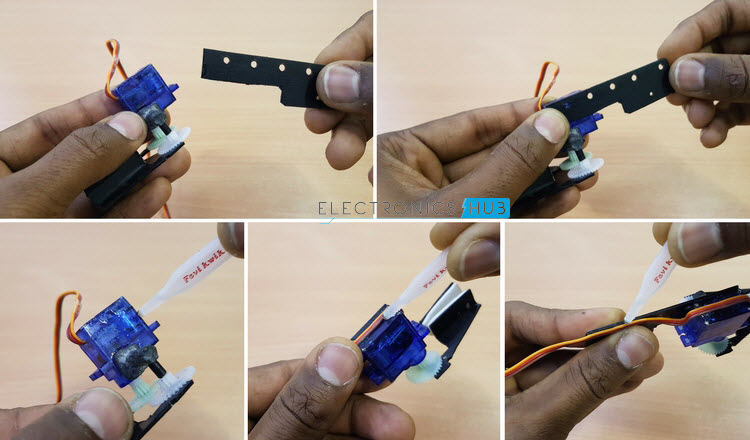
步骤6
- 现在换到第二档,把一根小金属棒插到档位上。这个齿轮作为一个反转轮为持杆伺服。
- 取一小块电线的橡胶套筒,把它插到杆上。这个套筒将固定齿轮的位置而不晃动。
步骤7
- 两个齿轮必须连接在一起,当一个齿轮顺时针方向旋转时,另一个齿轮反时针方向旋转。
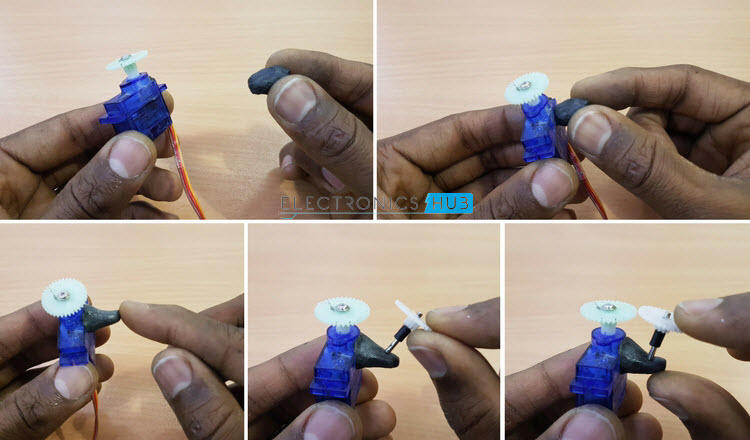
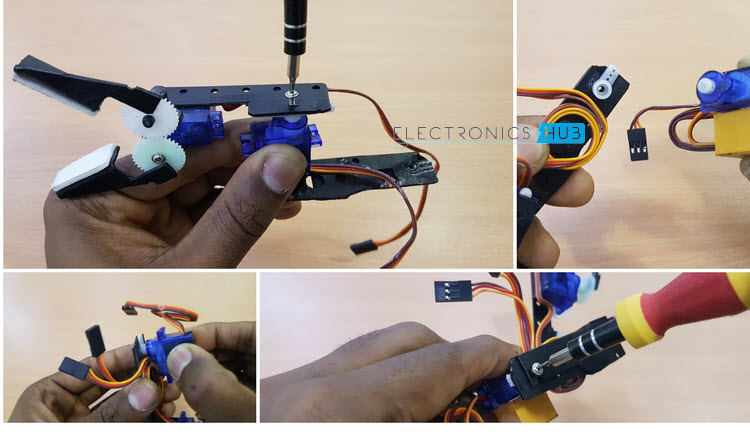
步骤8
- 为了附加的齿轮,我们需要保持第二齿轮牢固的伺服。为此,我们使用了环氧化合物。
- 等量的树脂和硬化剂必须采取和充分混合,直到它产生一个完整的黑色化合物。[查看本文:最佳树脂3D打印机

步骤9
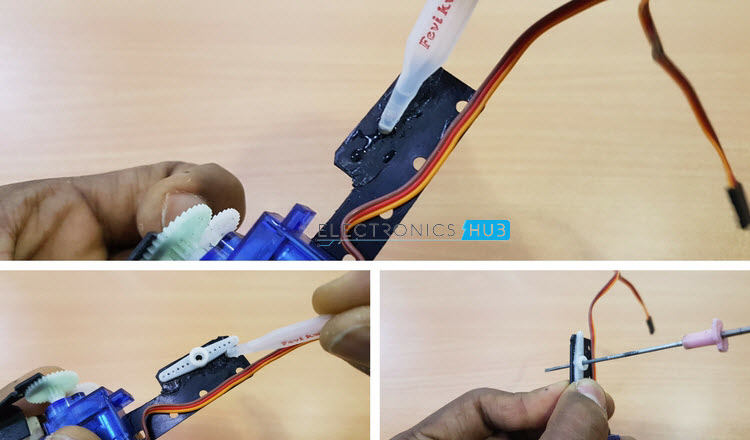
- 该化合物被附在伺服器上,它被塑造成一个方便的形状。
- 把第二档的变速杆插到起落架上,调整高度,使第二档与主档的高度相同。
第十步
- 现在,确保两个齿轮的齿是对齐的。对准齿轮后,让混合物干燥一段时间。
- 废掉伺服中不必要的化合物,以减轻重量。
- 胶水一个小橡胶套在第二档的顶部,以保持它牢固。

步骤11
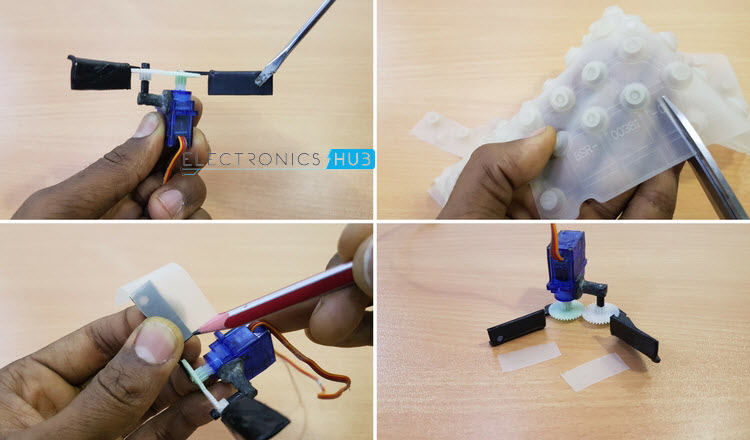
- 在这一步中,我们将构造持有对象的部分。为了这个目的,从一个旧玩具上取下了两块塑料片。
- 轻微加热塑料和弯曲一端如图所示。这种结构可以很容易地容纳不同的物体。
- 从塑料上剪掉多余的、多余的部分。用另一个塑料片做一个类似的片,但这个是第一个的镜像。

步骤12
- 胶水两个塑料片两个齿轮所示的图像。一定要把它粘牢,因为它们是真正固定物体的关键部分。
步骤13
- 塑料的表面非常光滑,可能无法很好地抓住物体。
- 为此,取橡胶或硅材料,并将其切割成支架部分的大小。这种橡胶会增加机器人手臂的抓地力。
- 为支架臂的两个部分制作两个这样的橡胶部分。
步骤14
- 现在,我们需要把这块橡胶粘到塑料钻头上。由于胶水无法将橡胶固定在塑料上,我们使用了双面胶带。
- 将橡胶部分固定在胶带的一侧,将胶带的另一侧固定在手臂的塑料部分。
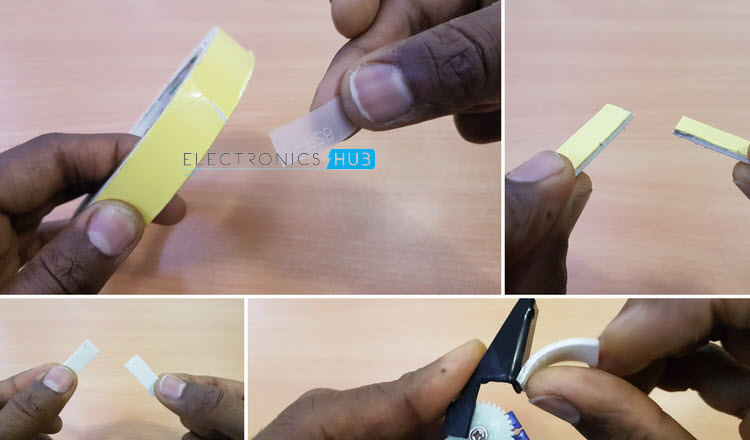
步骤15
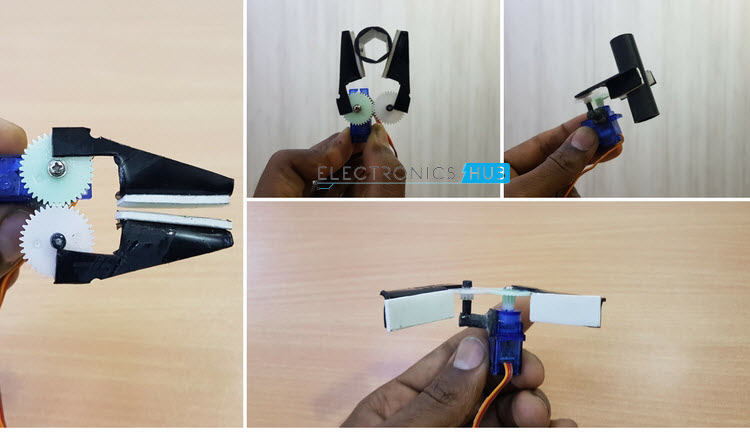
- 完成两端的手臂与橡胶抓地力和双面胶带。
- 测试并观察手臂的抓地力。这比用普通塑料固定物体要好。
- 这一步完成了与支架伺服和实际支架臂相关的构造。从下一步开始,我们将继续建设第一个垂直伺服。
步骤16
- 拿另一块塑料(大约7 - 9厘米),并把它粘到holder伺服器的侧面,就在化合物的下面。
- 这片塑料将连接支架伺服和第一垂直伺服。
- 现在,把支架伺服器的电线粘在支架伺服器的底部,也粘在塑料的一侧,这样就不会妨碍机械臂的运动。
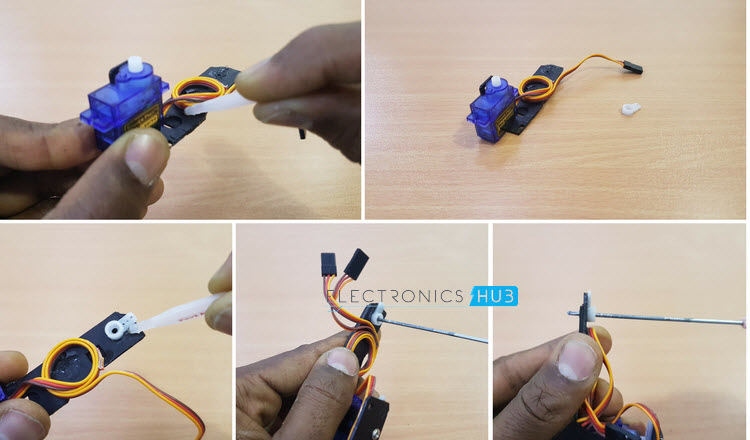
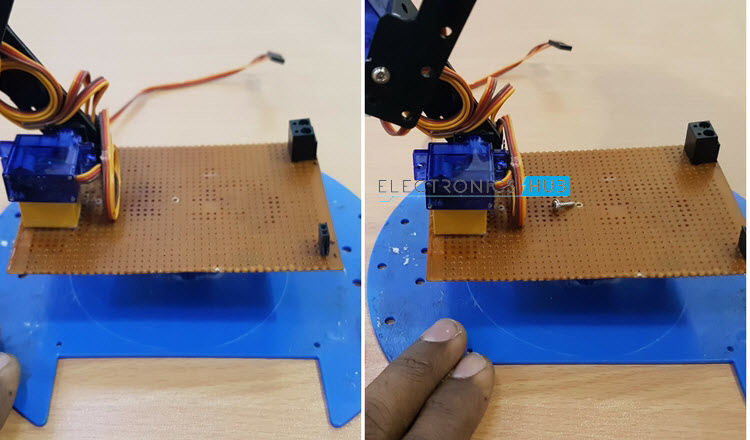
步骤17
- 为了固定第一个垂直伺服到塑料,我们将首先胶水伺服喇叭到塑料,如图。
- 现在,钻一个孔通过伺服喇叭的中心,使第一个垂直伺服可以正确拧。
18步
- 如图所示,取另一块塑料,在一端轻微加热,并将其弯曲90度。
- 弯曲部分必须粘在第一垂直伺服上。

步骤19
- 此时,我们可以将第一个垂直伺服固定在支架伺服的塑料上,并拧紧它。
20步
- 我们稍后将修复伺服系统。现在我们将管理的电线第一个垂直伺服胶水它的塑料是附加到。
- 接下来,我们将采取一个小的伺服喇叭和胶水它在塑料的末端。这个喇叭将连接到第二个垂直伺服。
- 此外,钻一个孔通过伺服喇叭和塑料伺服要拧。
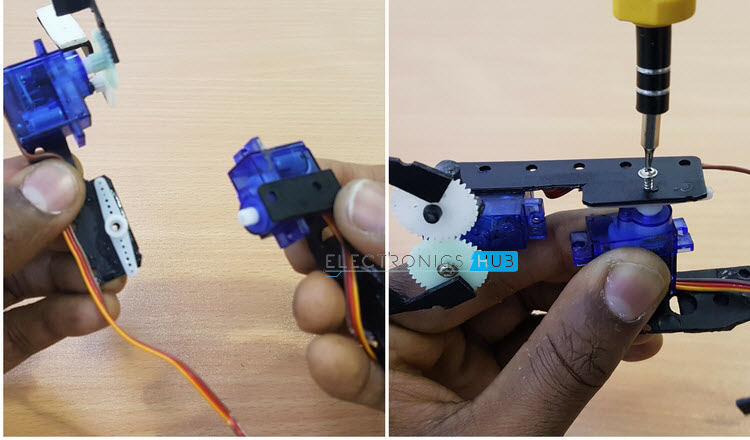
步骤21
- 采用第二个垂直伺服和一个小的长方体结构作为额外的支持。
- 把第二个垂直伺服器粘到长方体结构上。这个长方体结构将给伺服器一些额外的高度。
一步22
- 如果支架伺服和第一垂直伺服没有早点固定,现在就把它们固定好。
- 另外,用螺丝将第二个垂直伺服装置固定在小伺服喇叭处的手臂上。
23步
- 最终的结构将如下图所示。
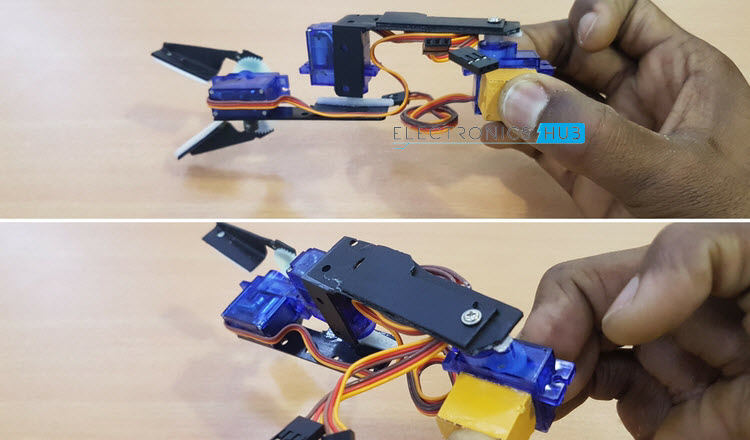
24步
- 现在,把长方体结构粘到零板上,靠近我们固定的伺服连接器。
- 另外,将伺服线连接到板上各自的连接器上。
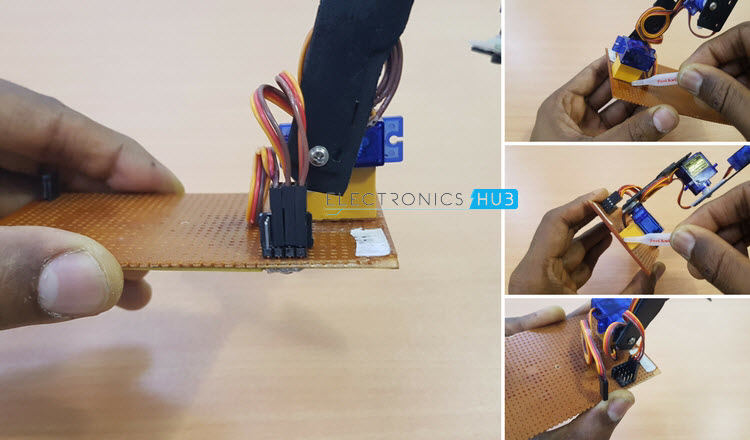
一步25
- 现在,我们将连接最后一个伺服,也就是水平伺服。这个伺服系统将有助于机器人的水平方向,即左右移动。
- 为此,取任何光滑,固体表面如图所示。
- 将水平伺服器粘在板子中心。确保伺服粘牢。
26步
- 如果你还记得,在步骤3和4中,我们在板的底部固定了一个伺服喇叭。
- 现在我们需要用螺丝把水平伺服固定在这个伺服喇叭上。
一步27
- 但是在拧紧伺服之前,如果你注意到,水平伺服上面的结构并不稳定,即使轻微接触也很容易摇晃。
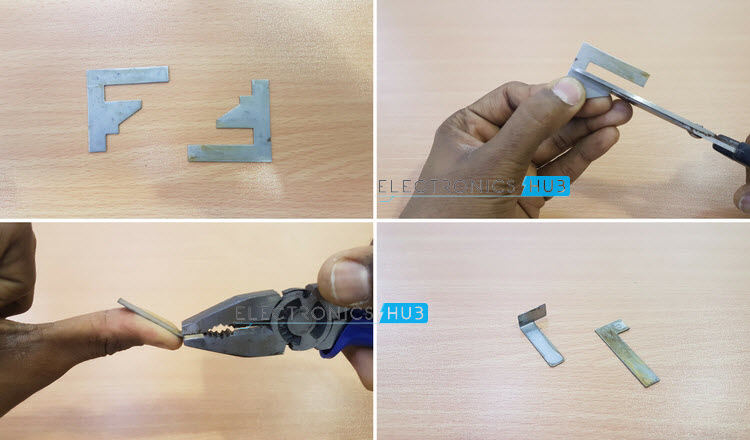
28步
- 因此,我们需要借助两个支撑物来平衡结构。
- 我们从一个旧变压器上取了两个软金属部件。它们足够坚固,可以支撑结构,也足够柔软,易于切割。
- 切割这些部分,并将它们弯曲成所需的形状,如图所示。
一步29
- 把支撑结构粘在木板上。如果胶水不能固定金属部件,在金属部件上焊接一些铅。
30步
- 完成两个支撑部分和胶水他们正确。
- 现在,将水平伺服固定在零板上的伺服喇叭上。检查一下,看结构是否摇晃。如果有,调整支撑件的高度。
- 现在,你可以把水平伺服牢牢地固定在板子上。通过这一步,我们完成了机械臂的最大构造。
步骤31
- 在这一步中,我们将把Arduino UNO板固定到零板上。为此,采取一些双面胶带和固定在零板的顶部,如图所示。
- 用这个胶带把Arduino固定在板子上。
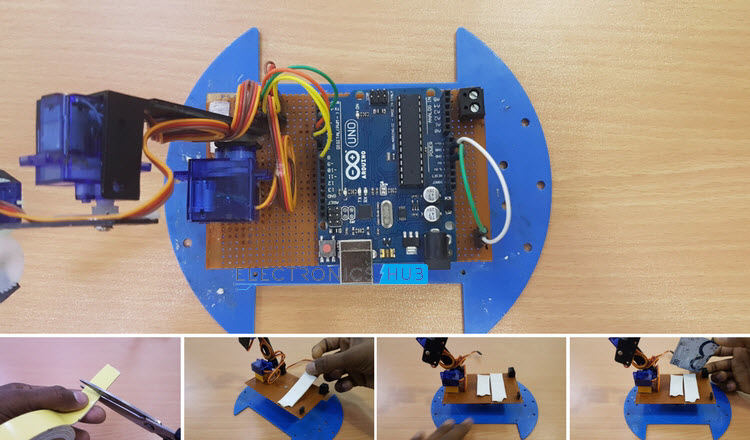
32步
- 对Arduino进行必要的接线连接,并连接板子和Arduino之间的电源线。
- 通过这一步,我们成功地完成了机械臂的构造。
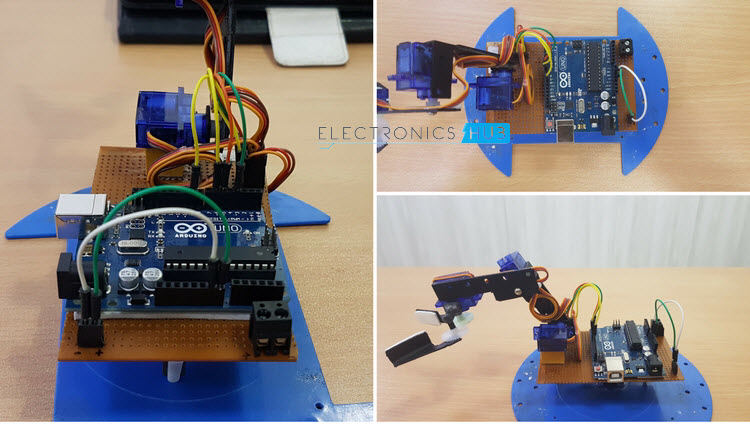
一步33
- 完成的机械臂的最终外观将是这样的。
- 这一步一步的构造说明,只是为了说明构造的过程。我们已经用现成的部件构建了Arm,并没有发现设计有什么困难。如果你打算制造一个机械臂,你不必遵循完全相同的步骤。
手动操作规范
现在您完全知道了如何构建Arduino机械臂,该机械臂在探测和拆除炸弹和大型工业中有重要应用,以加快过程。
对于那些对制作Arduino机器人项目有浓厚兴趣的人,我们提供最好的Arduino机器人套件.阅读完整的文章,并选择最符合您的需求的一篇。
推荐阅读:

43岁的反应
谢谢你的工作
不过,arduino的代码呢
自动驾驶代码
杰出的工作。
不过你能给我们arduino的代码吗?
我们会尽快更新代码。
这是否意味着它只能手动操作
干得好,但最主要的问题是arduino代码在哪里?
你能提供这个机械臂的代码吗?
嗨Anusha !
请问机械臂是如何知道它应该挑选的立方体的位置的(我是根据形状假设的)?你是否包含任何传感器?
嗨,立方体的位置是预先编程的使用逐步改变伺服电机。这样做是为了固定Arduino中立方体的三个位置。我们没有使用任何传感器或物体探测。只是老式的手动校准。
请立即上传代码
请给我们一个密码。
设置不错,请问我怎么拿到密码
你能尽快在“kssoni716@gmail.com”提供代码吗?
好的项目和更好的工作,但是.....没有代码,什么都做不了,你说,很快,就会更新代码,我问你,项目开始的时候没有代码吗。
我们不能证明,在任何方面的知识,是否,别人不能复制的文章。什么都没有,什么都没有留下。
代码
亲爱的先生,你的伟大项目,也正确地工作......伟大的!!!!
您可以把代码放在这个页面上。我检查我不是唯一一个请求它的人,或者,也许你需要为代码支付一定的钱?如果是的话,请不要犹豫联系我,到我的电子邮件地址,说明经济情况。谢谢你!
我仔细地等待你的答复。
丹尼尔。
查看更新后的项目。Arduino和蓝牙控制机械臂更多信息。
我想知道手臂能举起多少重量。它能举起小金属片吗?
你好,
这种机械臂不适合举重(因为它主要是由塑料废料制成的)。
请提供代码
请给我代码.............
代码
有人能提供一下代码吗?
非常有帮助,请把代码发给我们,谢谢
这种型号的总成本是多少?
你能给我报个价吗?
谢谢
将有一个升级的模型,这与3D打印零件,金属齿轮伺服器,蓝牙控制和专用的Android应用程序。我们将很快更新。
你还能用普通的面包板代替零PCB吗?
好
你好,你们有每日或每周的电子邮件可以注册吗?
嘿,你能把所需材料列个清单吗?这样我的生活就容易多了
谢谢
你好,
Aswome工作,
除了固定的位置,是否可以使用X,Y坐标来执行动作?
很棒的工作。
不过你能给我们arduino的代码吗?多做这样的项目
这很有帮助。
代码请. .
漂亮的项目
非常好的项目,
你能上传一段你提供的代码解释视频吗?
谢谢你!
osm项目
兄弟,我不懂arduino的代码。
嗨拉维!
你的好项目.........,只是有一个要求,请提供arduino代码,它的自动操作......
等待您的回复....
谢谢
Anurag
我能得到所需零件的清单吗?
先生,如果不使用pcb板,我们怎么能在面包板上完成所有的连接,你能和我们分享电路图的信息吗
请提及代码,但一个惊人的工作
请出示接线图好吗?
您能在代码行旁边添加注释来解释这个特殊的功能吗?这对刚接触机器人技术的人很有帮助。
如果我用特殊的传感器来做颜色分类,它能工作吗