在这个项目中,我们将了解L293D和L298N电动机驱动程序,以及将DC电动机与DC电机接口8051微控制器在L293D和L298N的帮助下。
当我们谈论控制机器人时,第一件事就是控制直流电机。在机器人应用中,将直流电动机接口到微控制器是非常重要的概念。通过将直流电动机连接到微控制器,我们可以做许多事情,例如控制电动机的方向,控制电动机的速度。本文介绍了您如何使用AT89C51控制器控制直流电机(或任何变体8051微控制器)。
大纲
电路原理
微控制器引脚的最大输出电流为5V时15mA。但是,大多数直流电动机的功率要求都无法触及微控制器,甚至由电动机产生的后电动势(电动动力)触及可能会损坏微控制器。
因此,直接将直流电动机与控制器接口不好。因此,我们在直流电动机和微控制器之间使用电动机电路。
还阅读有趣的概念:将7个段显示与8051微控制器接口
在这里,我们使用的是L293D和L298N电动机驱动器IC来驱动直流电动机。使用这些IC,我们可以一次驾驶两个DC电动机。对于L293D电动机驱动器,电动机供应量在4.5至36V之间可变,并且提供了600mA的最大电流。在L298N的情况下,电动机供应量高达46V,并且电流为3A。
关于L293D电机驱动器的简短说明
L293D是四倍的H-桥电动机驱动器,顾名思义,它用来驱动直流电动机。该IC根据H桥的概念起作用。H桥是一个电路,允许在任一方向上的电压控制电动机方向。
L293D有4个输入引脚。电动机方向取决于在此引脚上应用的逻辑输入。EN1和EN2必须高才能驱动2个DC电动机。
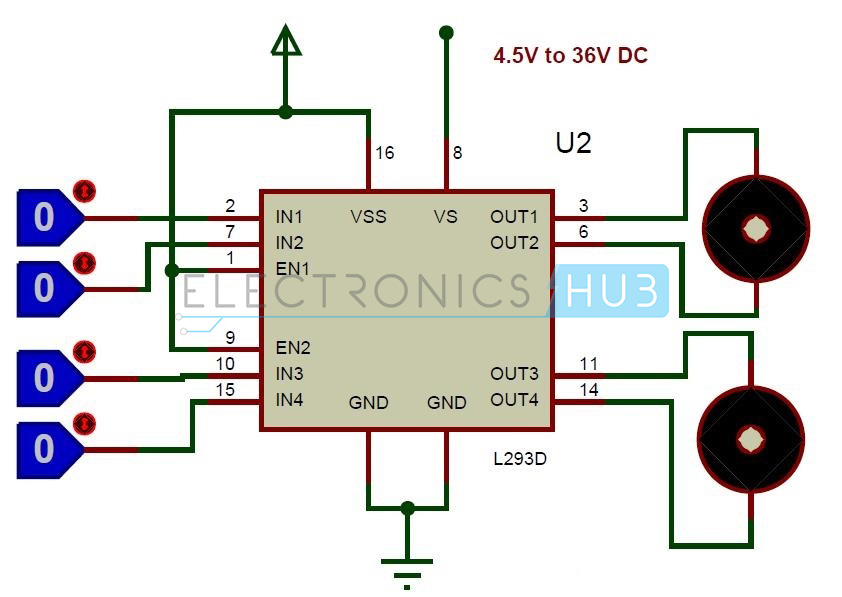
- in1 = 0和2 = 0-> Motor1空闲
- in1 = 0,in2 = 1-> Motor1 Anti Clock Wise方向
- in1 = 1和2 = 0->电动机时钟明智的方向
- in1 = 1和2 = 1->电动机1空闲
- in3 = 0和in4 = 0->电动机2空闲
- in3 = 0和in4 = 1-> Motor2抗锁定方向
- in3 = 1和in4 = 0-> Motor2时钟方向
- in3 = 1和in4 = 1->电动机2空闲
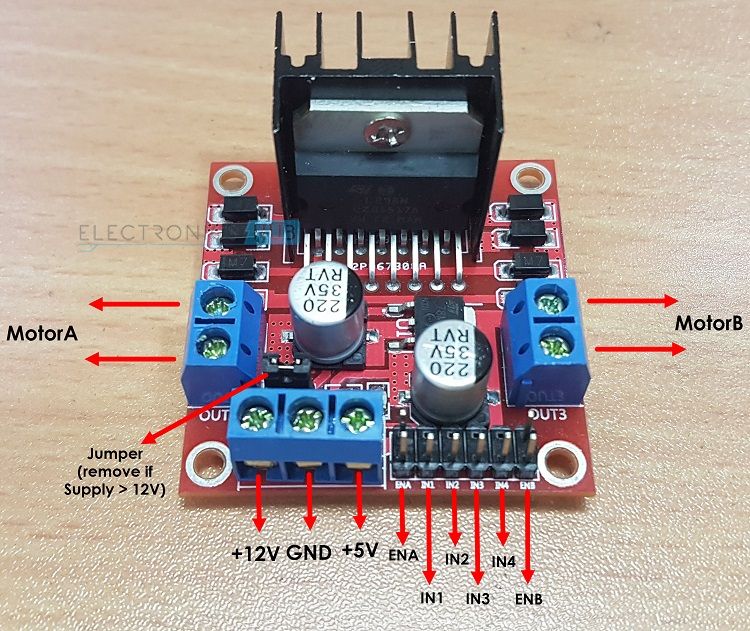
关于L298N电动机驱动器的简短说明
L298N电动机驱动器模块是更常用的驱动程序IC现在的时间。L298N的电流和电压等级高于L293D电机驱动器的电流和电压。
有关L298N电机驱动器模块的更多信息,请参阅“关于L298N电动机驱动器的简短说明“。
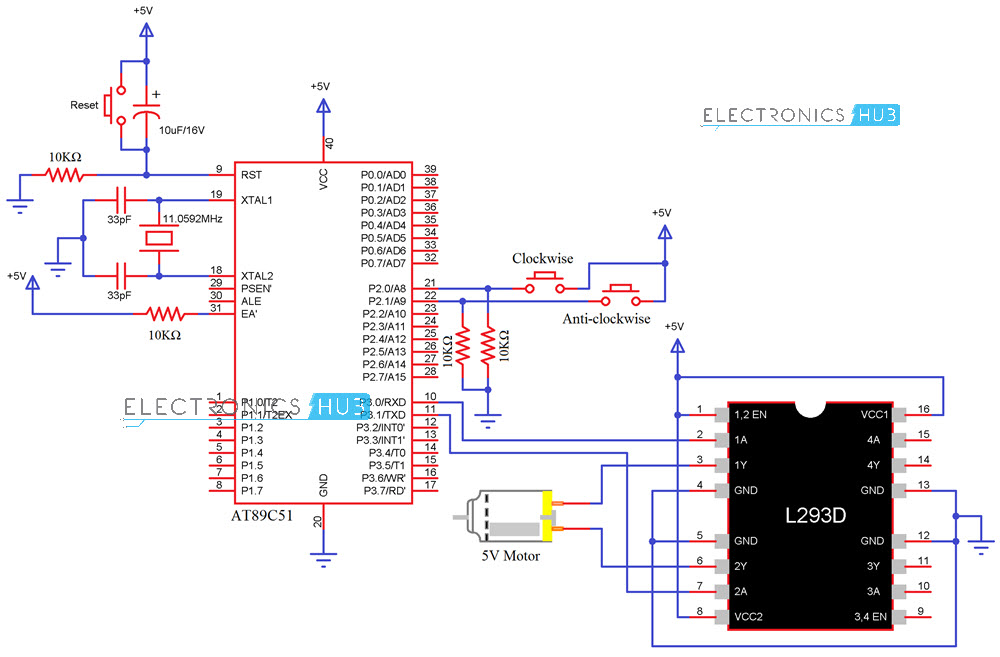
与8051微控制器和L293D接口的直流电动机的电路图
需要组件
- AT89C51(8051微控制器)
- 8051程序员
- 编程电缆
- 12V直流电池或适配器
- L293D电机驱动器
- 直流电动机
- 电解电容器 - 10UF
- 2个陶瓷电容器 - 33pf
- 10K电阻(1/4瓦) - 4
- 按钮 - 3
- 连接电线。
电路设计
上述电路图中的主要组件是AT89C51微控制器和电动机驱动器。在这里,电动机驱动器输入销1,IN2分别连接到P3.0和P3.1,以控制电动机方向。直流电动机连接到L293D的输出端子。EN1引脚连接到5V DC以驱动电动机。
开关在下拉配置中连接到微控制器的P2.0和P2.1。第一开关沿顺时针方向旋转电动机,第二开关将电动机沿抗顺时针方向旋转。8Th和16Th电机驱动器的引脚连接到 +5V电源。
算法
- 将P2.0和P2.1声明为输入,P3.0和P3.1为输出。
- 现在检查天气,第一个按钮是否按下。如果按下,请将逻辑一发发送到p3.0。
- 接下来,检查第二个按钮是否按下。如果按下,请将逻辑1发送至P3.1,否则将0发送到端口3。
代码
电路模拟视频
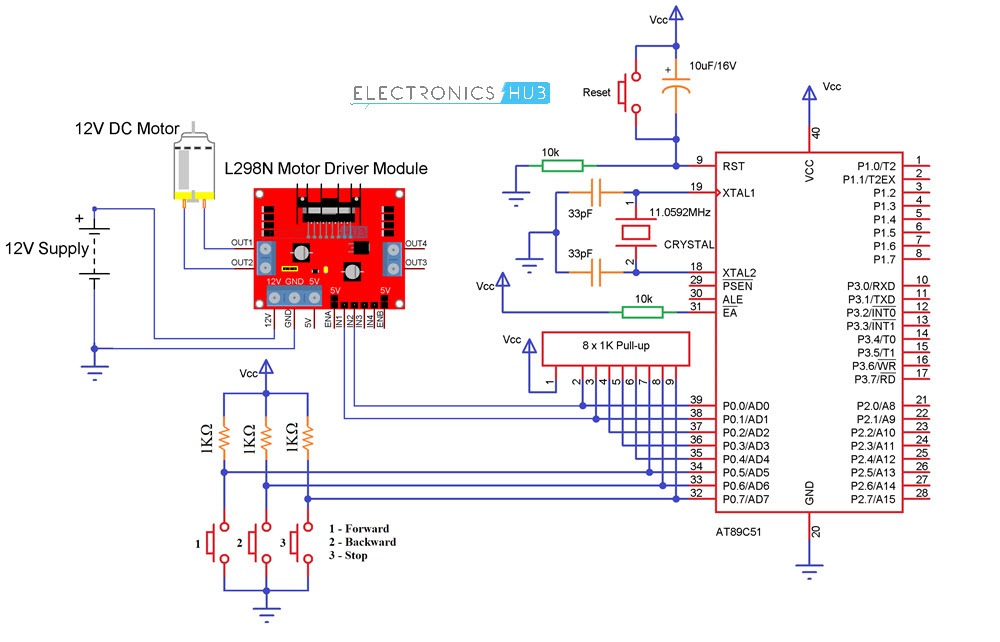
与8051微控制器和L298N接口直流电动机接口的电路图
需要组件
- AT89C51(8051微控制器)
- 8051程序员
- 编程电缆
- 12V直流电池或适配器
- L298N电机驱动器模块
- 12V直流电动机
- 电解电容器 - 10µF
- 2个陶瓷电容器 - 33pf
- 10kΩ电阻(1/4瓦)
- 1KΩ电阻(1/4瓦) - 3
- 8 x1kΩ电阻包
- 按钮 - 4
- 连接电线。
电路设计
与上述电路类似,L298N电机驱动器的IN1和IN2连接到微控制器的端口0引脚P0.0和P0.1。在电动机驱动器模块的OUT1和OUT2端子上连接了12V DC电动机。
为了控制电动机的旋转方向,我将使用三个连接到端口0引脚P0.5,P0.6和P0.7的按钮。
算法
- 将P0.5和P0.6声明为输入,P0.0和P0.1为输出。
- 现在检查天气,第一个按钮是否按下。如果按下,请将逻辑一发出到p0.0和逻辑0到p0.1。这将使电动机向前旋转。
- 接下来,检查第二个按钮是否按下。如果按下,请将逻辑1发送至P0.1,然后将逻辑0发送到P0.0,以向反向旋转电动机。
代码
如何操作?
- 将程序刻录到8051微控制器。
- 现在根据电路图给出连接。
- 在提供连接的同时,请确保从电池到控制器没有直接的供应连接。
- 打开董事会供应,现在电动机处于固定状态。
- 按下一个按钮,您可以观察到电动机将沿顺时针方向旋转。
- 按下第二个按钮,现在电动机沿逆时针方向旋转。
- 关闭董事会供应。
申请
- 此概念用于机器人控制机器人方向。
- 用于控制直流电动机的速度。
- 它用于我们需要驱动高压电动机的应用中。
推荐阅读:

28个回应
先生,你好
我想问一下,如果我必须使用3051 UC的3个DC电动机,我可以使用2 L293D IC吗????
还是还有其他选择???
建议我先生。
谢谢…。
阿卜杜勒基础
通过引用这样的代码样品来开发另一个项目。我尝试执行一个机器人的Spry项目,我需要一个代码来驱动两个电动机,因此我只问您这个问题。我认为您的代码使我对我的项目清晰起见,需要简单的更改。和所有人的坦克
我想做这个项目,因为我想了解机器人技术,并且该项目将在其中帮助我。.我认为这个项目在Rebotics中具有很好的应用。因此,请给我发送项目代码,我将可以从中进行此项目。谢谢
实际上是在第二年的电气工程中。我对代码获得了一些帮助,因为他们在机器人项目上进行工作。我对此提出了浓厚的兴趣。请给我这些代码,因为这是我的开始。谢谢
我正在为科学做同一个项目。.请给我您的代码并帮助我
在基于微控制器的应用程序上进行项目,为此,需要一些帮助,因此请向我发送代码……谢谢您
IAM在做一个名为“全自动太阳草切割机”的项目,因此我需要该程序来控制电动机驱动器IC,我希望它的程序
我需要您的项目代码。因为我感兴趣的是微控制器相关的代码。
需要另一个项目的代码。pls帮助。
你可以给同一代码吗
你能提供项目代码吗
你好先生,
我试图制作电子duster……所以我决定在这些电动机的帮助下将我的duster连接起来……可以这样做吗?
需要另一个项目。需要帮忙 !
上传代码,请检查文章
如何将此代码用于Keil?
它由很多文件组成
有一个文件。
你好先生
需要基于微控制器的项目代码。
请给我代码。
文章中提供的代码是从那里下载的。
通过引用这样的代码样品来开发另一个项目。我需要您的代码,因为此代码使我对我的项目有所了解。
从帖子本身下载代码。
我要为CNC机器制作Owen控制。我知道。微处理器知识。但是如何使Cerkit Bord呢?Assambl如何各种组件。该组件之间的链接如何?
请帮我
嗨,sr pleas,我要知道电容器在project上的使用
请给我代码FO DC电动机接口..
海。如何改变直流电动机的速度?
@AFIQ,通过使用TMOD寄存器的模式1,您可以重新加载计时器寄存器以更改占空比并产生不同的电动机的振荡频率
速度可以变化吗?
使用此电路,不!
主要的两个原因迫使我们通过驱动程序将电动机与微控制器连接