大纲
简介
我们今天看到的几乎每一个机械动作都是由电动机完成的。电动机吸收电能,产生机械能。电动机有各种等级和尺寸。大型电动机的一些应用包括电梯、轧机和电动火车。小型电机的一些应用是机器人、汽车和电动工具。电动机分为两类:直流(直流电)电动机和交流(交流电)电动机。交流电机和直流电机的作用是一样的,都是把电能转化为机械能。
这两者之间的基本区别是电源,是交流电机的交流电源和直流电机的电池一样的直流电源。交流电机和直流电机都由定子和转子组成,定子是固定的部分,转子是电机的旋转部分或电枢。电动机的工作原理是基于定子产生的磁场和流经转子的电流的相互作用,以产生转速和转矩。
直流电机有不同的种类,它们的工作原理都是一样的。直流电动机是一种用于产生转速可控的连续运动的机电致动器。直流电机是理想的应用在速度控制和伺服式控制或定位是必需的。
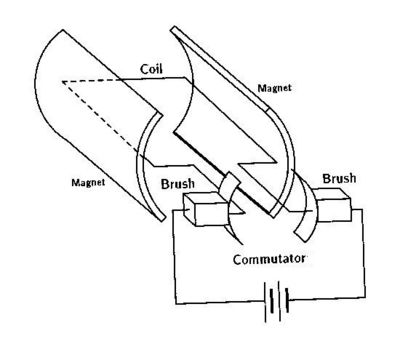
一个简单的直流电机如下所示。

如前所述,任何电机都由定子和转子两部分组成。根据配置和结构,直流电机有三种类型:有刷电机、无刷电机和伺服电机。
直流电机工作原理“,
机电能转换装置将在输入端获得电能,并在输出端产生机械能。有三种电机被广泛用于这一任务:直流电机,感应或异步电机和同步电机。感应电机和同步电机是交流电机。在所有的电机中,当连接线圈的磁通量改变时,电能就转化为机械能。
电动机以电能为输入,并转化为机械能。
当电能作用于垂直于磁场方向的导体上时,流过导体的电流与磁场之间相互作用的结果就是一个力。这种力将导体推向与电流和磁场垂直的方向,因此,这种力本质上是机械的。
如果知道磁场的密度B、导体L的长度和流经导体I的电流,就可以计算出力的值。
施加在导体上的力由
F = B×I×L牛顿
借助弗莱明左手定则,可以确定导体运动的方向。
弗莱明左手法则适用于所有的电动机。
下图代表弗莱明左手法则。
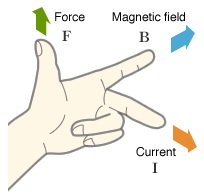
当一个带电流的导体被置于磁场中时,一个力作用在导体上,这个力与磁场和电流的方向都垂直。
根据弗莱明左手法则,左手拇指代表力的方向,食指代表磁场的方向,中指代表电流的方向。
直流电机由两组线圈组成,称为电枢绕组和磁场绕组。磁场绕组用于产生磁场。一组永磁体也可用于此目的。如果使用磁场绕组,它就是一个电磁铁。磁场绕组是电机的固定部分或定子。电枢绕组是电机的转子部分。转子置于定子的内部。转子或电枢通过机械换向器连接到外部电路。
一般采用铁磁材料制作定子和转子,定子和转子之间用气隙隔开。定子内部的线圈由多个线圈串联或并联而成。铜绕组通常用于电枢绕组和现场绕组。
下面解释直流电机的工作原理。
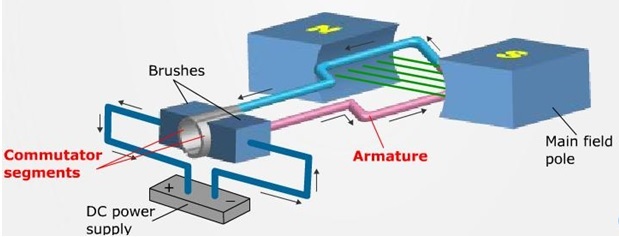
考虑一个线圈放在磁场中,磁通密度为B特斯拉。当线圈通过连接到直流电源为其提供直流电时,电流I流过线圈的长度。线圈中的电流与磁场相互作用,其结果是根据洛伦兹力方程在线圈上施加一个力。这个力与磁场的强度和导体中的电流成正比。
直流电动机也采用同样的原理,它由几个缠绕在电枢上的线圈组成,所有的线圈都承受相同的力。这个力的结果就是电枢的旋转。导体在磁场中的旋转会产生转矩。根据电磁感应的法拉第定律,线圈在磁场中不同位置与导体相连的磁通量是不同的,这些导致线圈中产生电动势。这种电动势称为反电动势。此电动势的方向与负责电流在导体中流动的电源电压相反。因此,在电枢中流动的电流总量与电源电压和反电动势之间的差成正比。
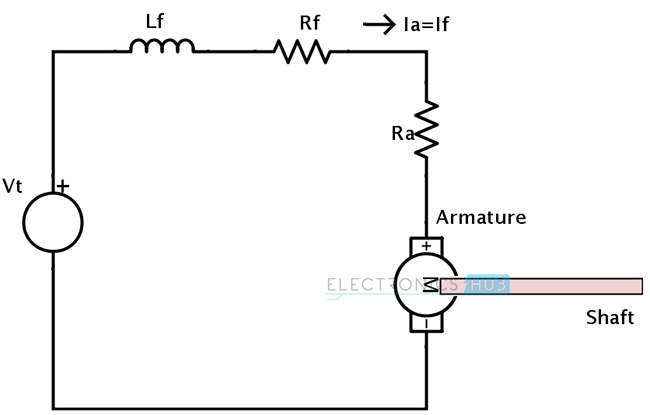
电学等效的直流电机如下所示。
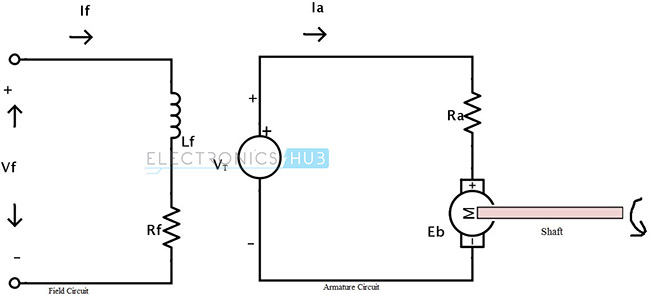
直流电机的电气等效电路分为两个电路:电场电路和电枢电路。磁场电路负责磁场,并提供一个单独的直流电压Vf.磁场绕组的电阻和电感用R表示f和Lf.由于电压的作用,产生电流If在绕组中产生,并建立必要的磁场。
在电枢中,电压VT通过电机的两端施加电流I一个在电枢回路中流动。电枢绕组的电阻为Ra,电枢内感应的总电压为Eb.
在两个电路中应用基尔霍夫电压定律,
Vf=我f* Rf
VT=我一个* R一个+ Eb
电机中形成的转矩为
T = k * I一个*Φ
其中k是常数,取决于线圈的几何形状,Φ是磁通量。
电机的功率为Eb*我一个.
将功率转换为机械形式的发展功率如下:
P = t * ωnω是角速度。
这是传递到感应电枢电压和的总功率
Eb*我一个= t * ωn
直流电机的种类
直流电机按转子的供电方式主要分为两种。它们是有刷直流电机和无刷直流电机。顾名思义,电刷存在于有刷直流电动机中,通过换向器为旋转电枢提供电流,而在无刷直流电动机中不需要电刷,因为它使用永磁体转子。
刷直流电机
在这种类型的电机中,磁场是通过电流通过转子内部的换向器和电刷产生的。因此,它们被称为拉丝电机。刷子是由碳构成的。这些可以是单独激发或自激发的电机。
电机的定子部分由线圈组成,线圈以圆形方式连接,形成所需的可选南北极。这种线圈设置可以串联或并联转子线圈绕组,形成串绕直流电动机和分绕直流电动机。直流电机的电枢或转子部分由换向器组成,换向器本质上是一个携带电流的导体,一端连接到电隔离的铜段。当电枢转动时,外部电源可通过电刷连接到换向器。

有刷直流电动机类型
直流电机按电枢绕组和磁场绕组的电气连接方式进行分类。不同类型的连接产生不同类型的电机。直流电机是根据产生的磁场来划分的。直流电机主要有三种类型:分励、自励和永磁。在永磁式电机的情况下,用一个强大的磁铁来产生所需的磁场。如果是分励和自励电机,则在定子结构中安装一个电磁铁。
自激型直流电机又分为三种:并联型、串联型和复合型。
复合激励型电机又分为累积复合和差动复合,每一种复合激励都有长分流和短分流两种类型。
他励电动机
顾名思义,单独励磁直流电机使用不同的电源进行电枢绕组和磁场绕组。这意味着电枢绕组和磁场绕组在电上是分开的。
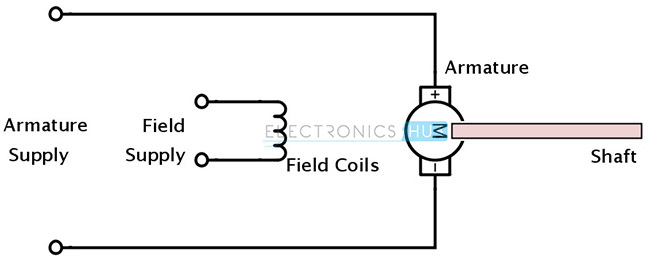
由于源不同,电枢电流和磁场电流互不干扰。但是总的输入功率是各个功率的和。如果Vf和我f电压和电流是否对应于磁场电路和Vt和我一个电压和电流对应电枢电路,则总输入功率为Vf*我f+ Vt*我一个.
自激电机
在自励直流电机中,不是单独的电压源,而是通过单个电源连接励磁绕组和电枢绕组。这种连接有两种方式:并联或串联。因此,自激电机又被分为并绕直流电动机和串绕直流电动机。
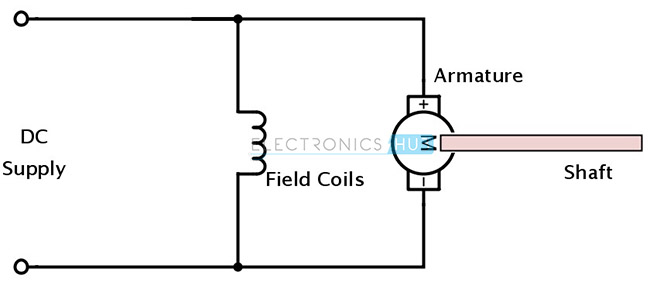
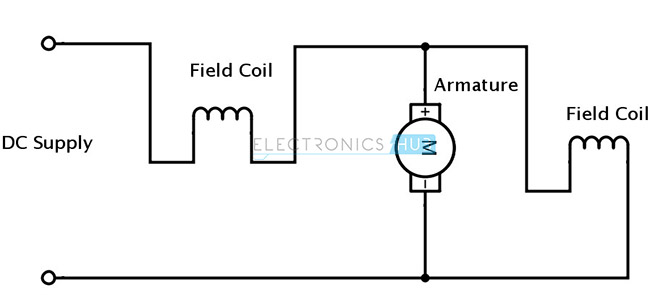
并励直流电机在并联直流电机的情况下,励磁绕组和电枢绕组并联在同一电源上,因此励磁绕组暴露在整个终端电压下。即使电源是相同的,磁场电流和电枢电流是不同的。并联直流电机的速度是恒定的,不随输出机械负载的变化而变化。
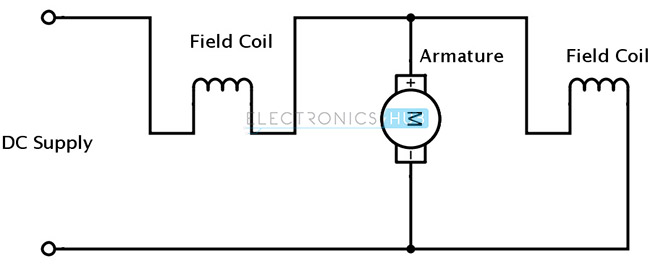
并联直流电机的结构如下图所示。
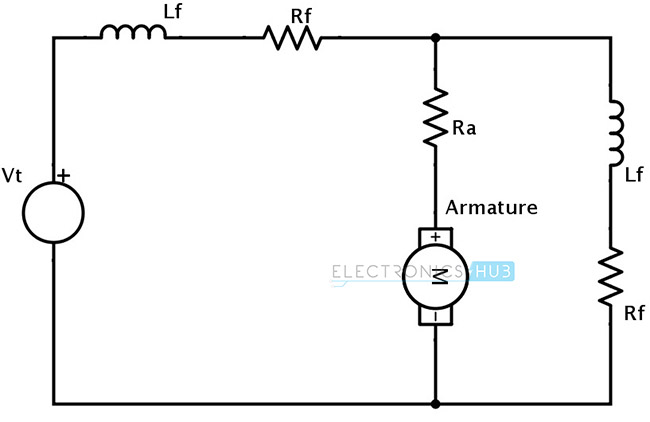
并联直流电动机的电气等效如下所示。
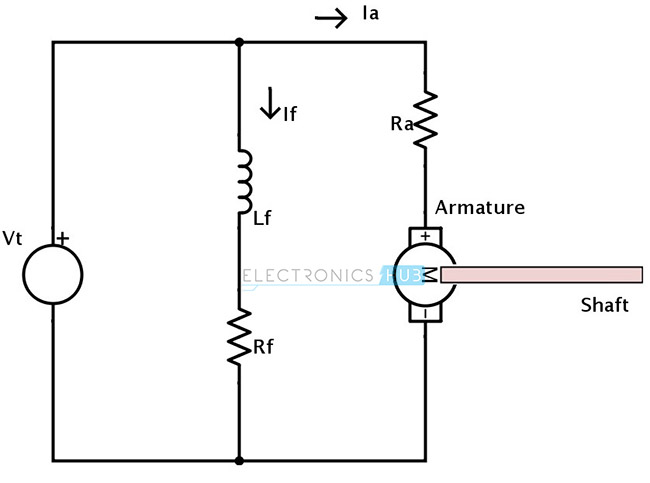
如果Eb那是电机的反电动势吗
Vt= Eb+我一个* R一个
如果电枢常数是Ka,它的旋转速度是ω,那么
Eb= K一个* ω * Φ
其中Φ为磁通量。
因此,
Vt= K一个* ω * Φ + I一个* R一个
总电流是It=我f+我一个
因此,总幂是P = Vt*我t
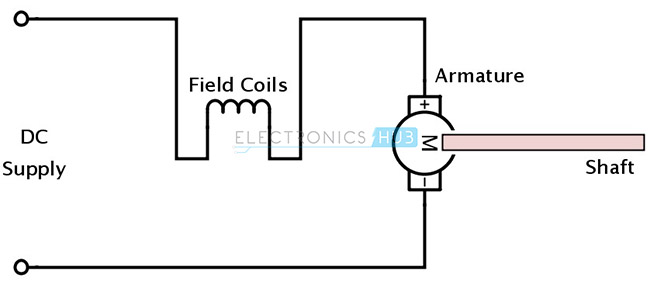
系列电机:如果是串联直流电机,则励磁绕组和电枢绕组与电源串联。因此在磁场绕组和电枢绕组中流动的电流相同。
串绕电机也被称为通用电机,因为它与交流电压电源或直流电压电源一起工作。
无论电压源的极性如何,串绕电机总是沿同一方向旋转。这是因为如果我们改变极性,电枢绕组的极性和磁场的方向会同时逆转。串联直流电机的转速随机械负载的变化而变化。
串绕直流电机的图示如下所示。
串联直流电动机的电气等效如下所示。
复合汽车:复合绕线电机采用串联绕组和并联励磁绕组的组合。串联绕组与电机电枢串联连接,并联绕组并联连接。
由于有两个产生磁场的场电路,根据磁通的方向,复合直流电动机可进一步分为两种类型。它们是累积复合直流电动机和差动复合直流电动机。
如果并联磁场的磁通辅助串联磁场的磁通,即两者方向相同,则为累加复合直流电动机。在这种情况下,总磁通是各个磁通的和。
Φ总计=Φ系列+Φ分流器
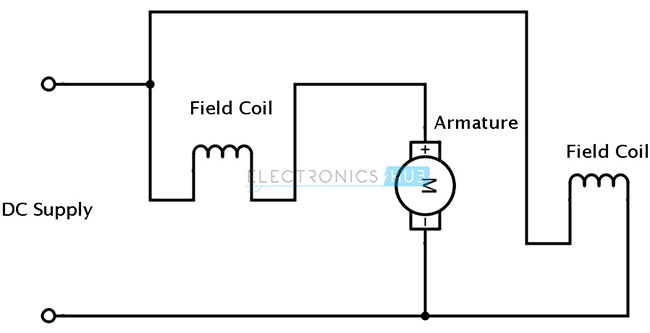
累加复合式直流电机的结构如下图所示。
电气当量如下所示。
对于差动复合直流电动机,串联场和并联场产生的磁通方向相反,总磁通为串联场和并联场的差值。
Φ总计=Φ系列- - - - - -Φ分流器
在这种情况下,净磁通小于原始磁通,因此差动复合直流电动机没有找到许多实际应用。
根据并联电场绕组的分岔情况,可将累加和差动复合式直流电机进一步分为长并联和短并联两种。
如果是长并联电机,并联磁场绕组与电枢和串联磁场绕组平行。
如果并联磁场绕组只与电枢平行,则为短并联。
永磁直流电机:在永磁直流电动机的情况下,用一个强大的磁铁来产生磁场。因此,永磁直流电动机仅由电枢绕组组成。
下图是一个永磁刷直流电机。
永磁刷直流电机比定子绕线式直流电机更小、更便宜。通常稀土磁铁,如钐钴或钕铁硼被用作永磁直流电机的磁铁,因为它们是非常强大的磁铁,具有高磁场。
永磁直流电动机的速度/转矩特性比定子绕线直流电动机更线性。
有刷直流电动机的缺点是在重载条件下换向器和电刷之间会产生火花。这产生了大量的热量,减少了电机的寿命。
无刷直流电机
无刷直流电机通常由一个永磁体转子和一个线圈缠绕的定子组成。这种设计通过在转子中使用永磁体消除了在转子部分需要刷。因此,与有刷直流电机相比,这些类型不包含任何电刷,因此没有磨损的电刷,因为产生的热量很少。
由于电机中没有电刷,应该有一些其他的方法来检测转子的角度位置。霍尔效应传感器用于产生控制任何半导体开关器件所需的反馈信号。无刷直流电动机比有刷直流电动机更贵,也比有刷直流电动机更高效。
直流伺服电机
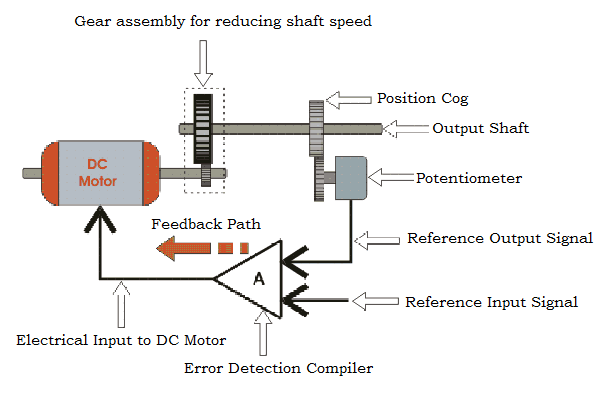
小型直流电动机会高速旋转,但其转矩不足以移动任何负载。直流伺服电机由四部分组成:普通直流电机、用于速度控制的齿轮箱、控制电路和位置传感单元。变速箱将采取高速输入和转换成较慢,但更实际的速度。位置感应装置一般是电位器。控制电路是一个测错放大器。
在直流伺服电机中,轴的位置反馈到控制电路,因此,它们用于闭环应用。
电位器与轴相连。它允许控制电路监测电机的位置。控制电路将该位置与参考输入信号进行比较。控制电路的输出反馈给电机。如果在当前位置和参考位置有任何不匹配,在错误检测放大器的输出端产生一个错误信号。基于这个信号,轴旋转并到达所需的位置并停止。
大多数直流伺服电机可以旋转180度0在任何方向。直流伺服电机被用于远程控制设备,机器人,甚至在大型工业应用。
驱动直流电机
在晶体管、开关或继电器的帮助下,直流电机可以被接通或关闭。电机控制的最简单形式是线性控制,它使用双极结晶体管作为开关。驱动电路的作用是控制绕组中的电流。电机的速度可以通过改变晶体管中的基极电流的量来控制。如果晶体管处于有源状态,那么电机以一半的速度旋转,因为只有一半的电源电压到电机。当所有的电源电压到达电机时,电机以最大速度旋转。当晶体管处于饱和状态时就会发生这种情况。
下面的电路用于向一个方向驱动电机。
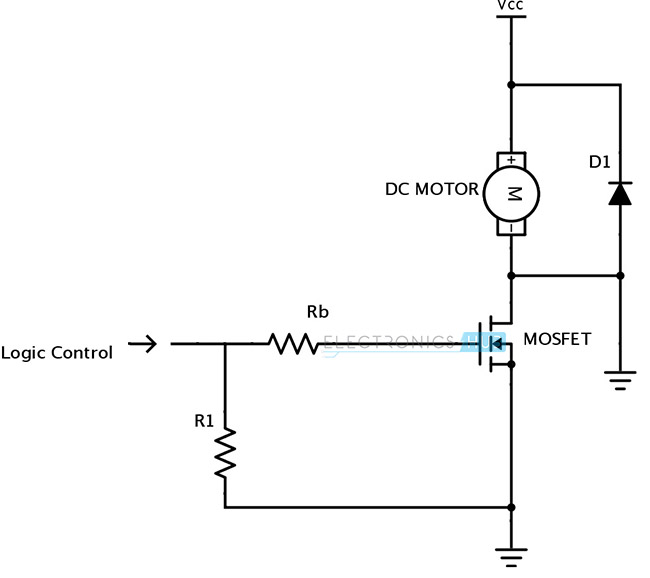
在上述电路中,电阻Rb和R1是非常重要的。电阻Rb用于保护控制电路不受电流尖峰的影响。电阻R1确保当输入引脚三态时晶体管被关闭。
电机的速度可以通过调节电源电压来控制,因为速度与电源的平均值成正比。
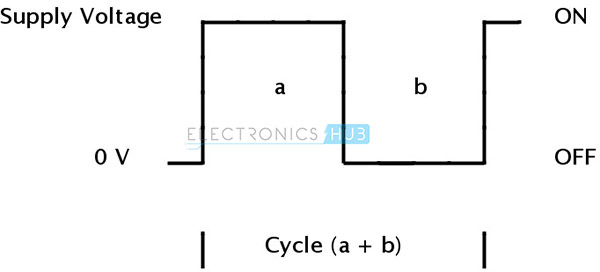
ON时间的百分比称为占空比。上述脉冲的占空比为β = a / (a + b)。
通过改变占空比,即通过改变脉冲的宽度,可以改变电机的转速。这被称为PWM(脉冲宽度调制)技术。也可以在不改变脉冲宽度的情况下改变速度。这是通过改变脉冲频率来实现的。这被称为PFM(脉冲频率调制)。
直流电机方向改变:上述驱动电路的缺点是它是单向的,即电机总是朝着一个方向旋转。为了改变电机的旋转方向,电源的极性必须颠倒。为了实现这一点,可以使用不同的开关。
第一个连接是使用DPDT(双杆,双掷)开关。
连接如下所示。
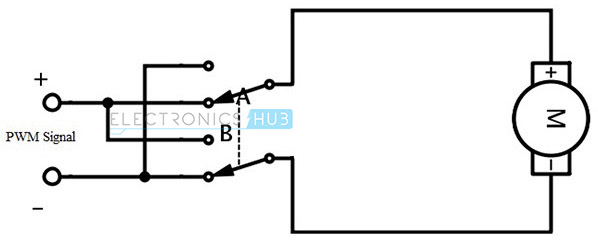
当开关在A位置时,电机向前旋转。当电机的端子连接到B位置的开关上时,方向相反。
第二个连接使用4个SPST(单Post,单Throw)开关。
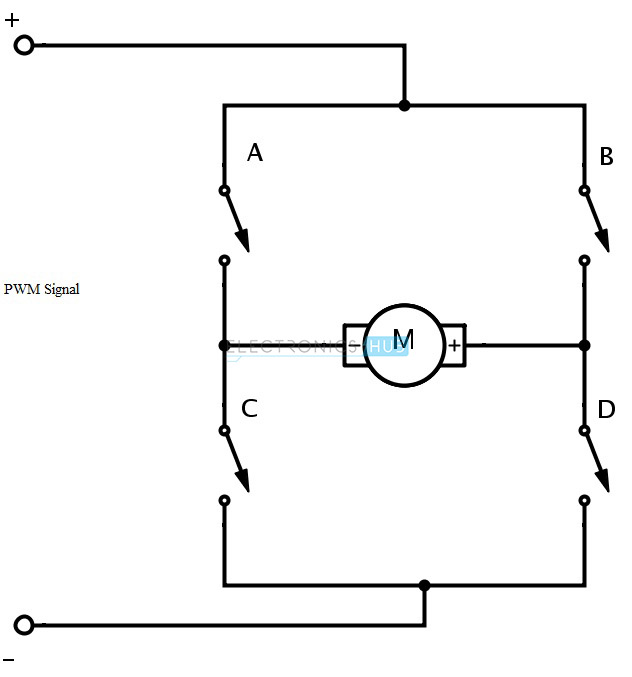
通过不同开关的组合,可以实现不同的功能。
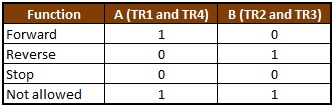
组合及其各自的操作如下。
A + D -前进方向
B + C -反向
A + B -停车和刹车
C + D -停车和刹车
全部关闭-停止
H桥电机驱动器
为了更好地实现直流电机的双向控制,需要一种称为H桥的电路。H桥的名称是给出了其原理图的位置相对于电机在中心杆。这个电路可以通过电机的绕组使电流向任意方向移动。
H桥直流电机驱动电路如下图所示。
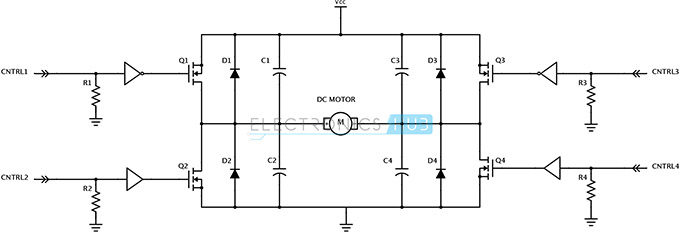
控制信号CNTRL 1、CNTRL 2、CNTRL 3、CNTRL 4分别用来开关Q1、Q2、Q3、Q4晶体管的ON、OFF。

这个操作是不言自明的。必须考虑的一个重要因素是,当输入不可预测时,所有fet必须处于OFF状态,这样h桥两端的晶体管就不会同时打开。因此,使用每个晶体管的下拉电阻。
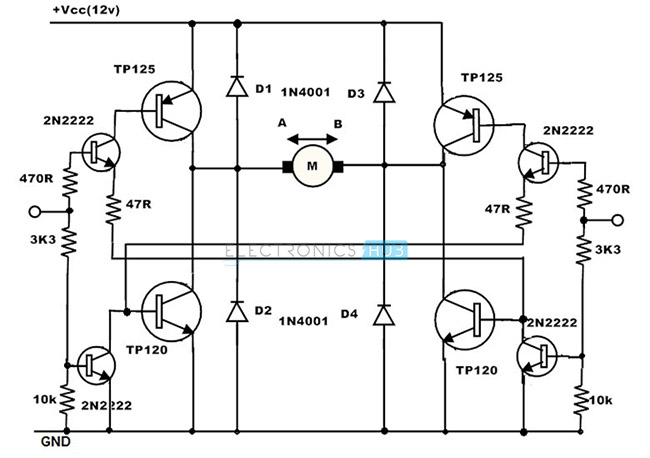
下面是H桥实现的另一个电路。
L293D电机驱动IC
L293D IC是一种基于H桥概念的电机驱动IC。这个集成电路允许电机在两个方向上驱动。L293D IC是一个16引脚器件,有两组输入和输出。因此,用一个IC控制两个直流电机是可能的。
L293D IC的引脚图如下图。
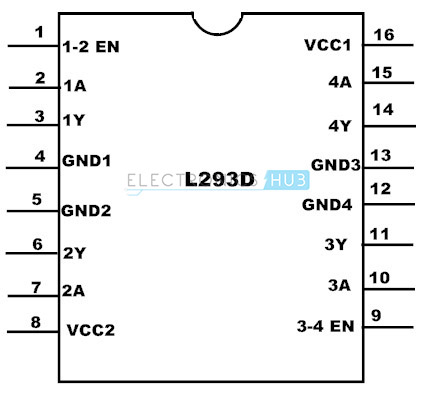 引脚2,7和10,15是控制信号,用于控制电机的旋转。
引脚2,7和10,15是控制信号,用于控制电机的旋转。
对于电动机1,
引脚2 =逻辑1,引脚7 =逻辑0——正向
引脚2 =逻辑0,引脚7 =逻辑1——反向
对于其他组合,没有旋转。
电机2也是如此,
引脚10 =逻辑1,引脚15 =逻辑0——正向
引脚10 =逻辑0和引脚15 =逻辑1 -反向。
使用L293D电机驱动IC控制两台电机的电路如下图所示。
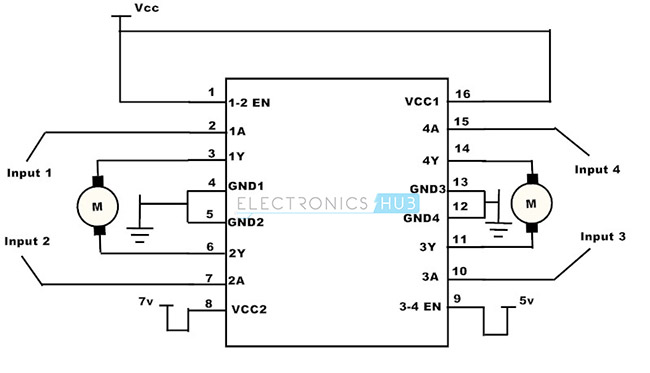 电压电源VCC1用于内部操作,即激活信号或启用或禁用。为驱动电机,使用电源VCC2。一般VCC1 = 5V, VCC2 = 9或12v。
电压电源VCC1用于内部操作,即激活信号或启用或禁用。为驱动电机,使用电源VCC2。一般VCC1 = 5V, VCC2 = 9或12v。

{kind=link}
{kind=link}
{kind=link}
{kind=link}