设计了一个简单的避障机器人方案。机器人是一个有趣且快速发展的领域。机器人技术作为工程学科的一个分支,随着技术的进步,其应用日益广泛。
移动机器人的概念正在快速发展,移动机器人的数量和复杂性随着应用的不同而不断增加。
移动机器人导航技术有路径规划、自定位和地图判读等多种类型。避障机器人是一种能够避免与意外障碍物发生碰撞的自主移动机器人。
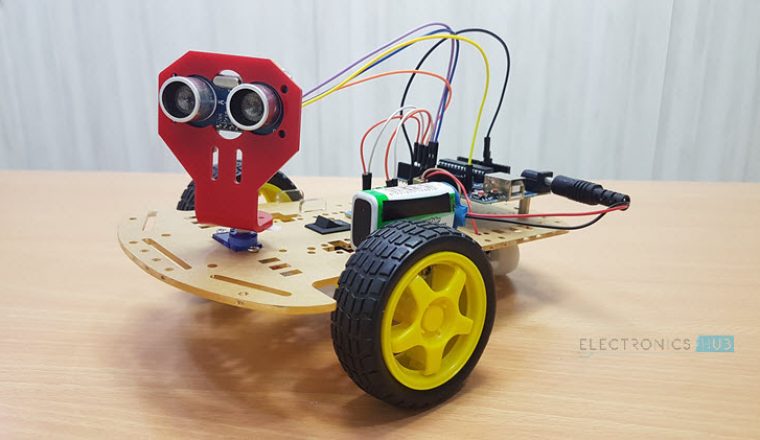
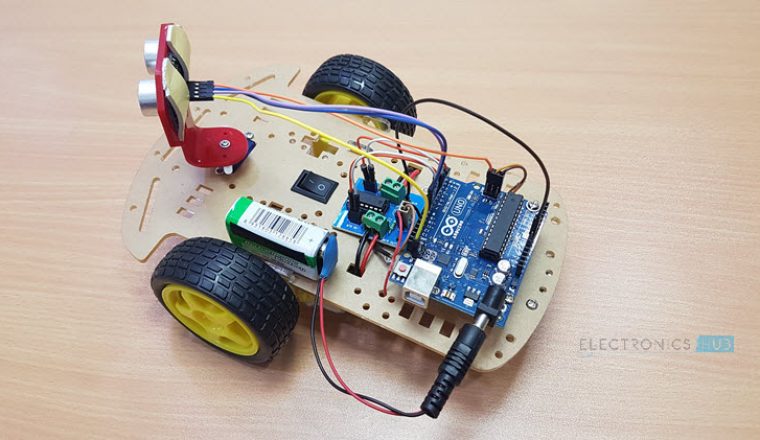
本课题设计了一种避障机器人。这是一个基于Arduino的机器人,使用超声波测距传感器来避免碰撞。
大纲
线路图
硬件要求
- Arduino Uno [在这里买]
- 超声波测距传感器- HC - SR04
- 电机驱动器IC - L293D [在这里买]
- 伺服电机(Tower Pro SG90)
- 减速电机x 2
- 机器人底盘
- 电力供应
- 电池连接器
- 电池座
组件描述
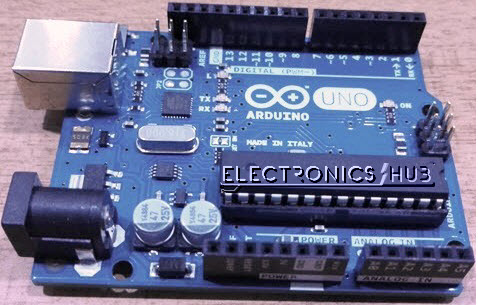
Arduino Uno
Arduino Uno是一款基于ATmega 328p单片机的原型板。它是一个开源的电子原型平台,可以用于各种传感器和驱动器。
Arduino Uno有14个数字I/O引脚,其中6个引脚用于这个项目。

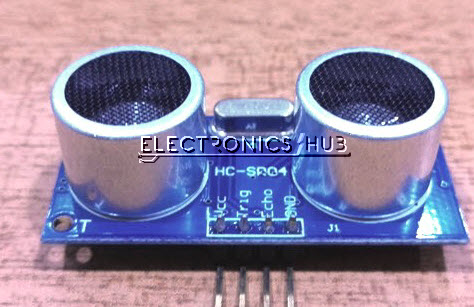
HC - SR04
这是一个超声波测距传感器。它是一种非接触式的距离测量系统,可以测量2cm到4m的距离。
L293D
它是一种可以为两个电机提供双向驱动电流的电机驱动器。
伺服电机
Tower Pro SG90是一个简单的伺服电机,可以在每个方向旋转90度(大约共180度)。
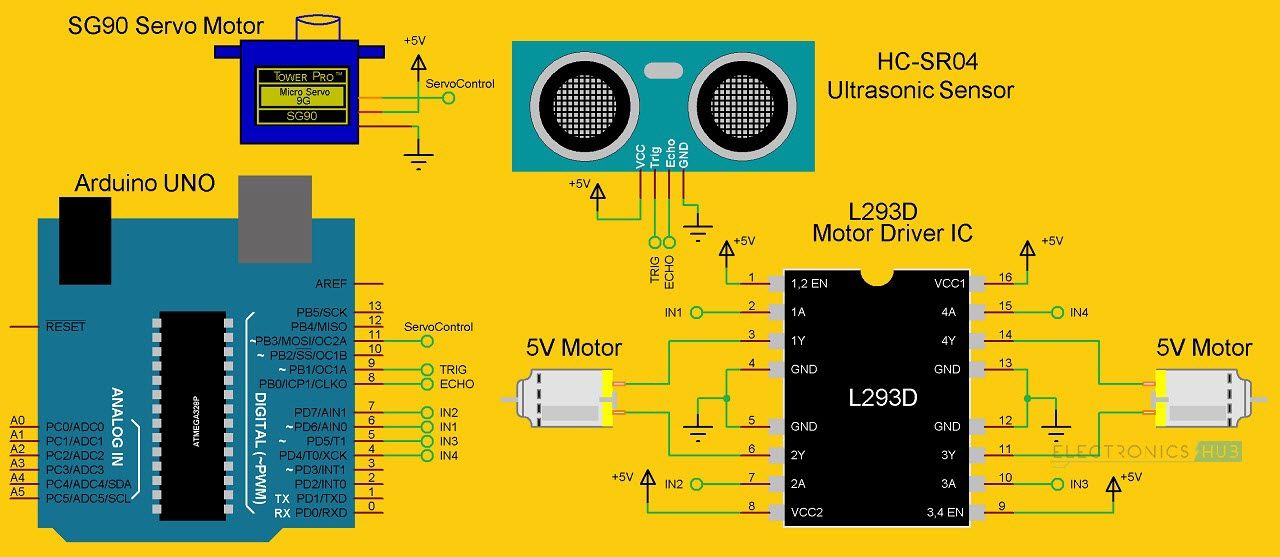
基于Arduino的避障机器人设计
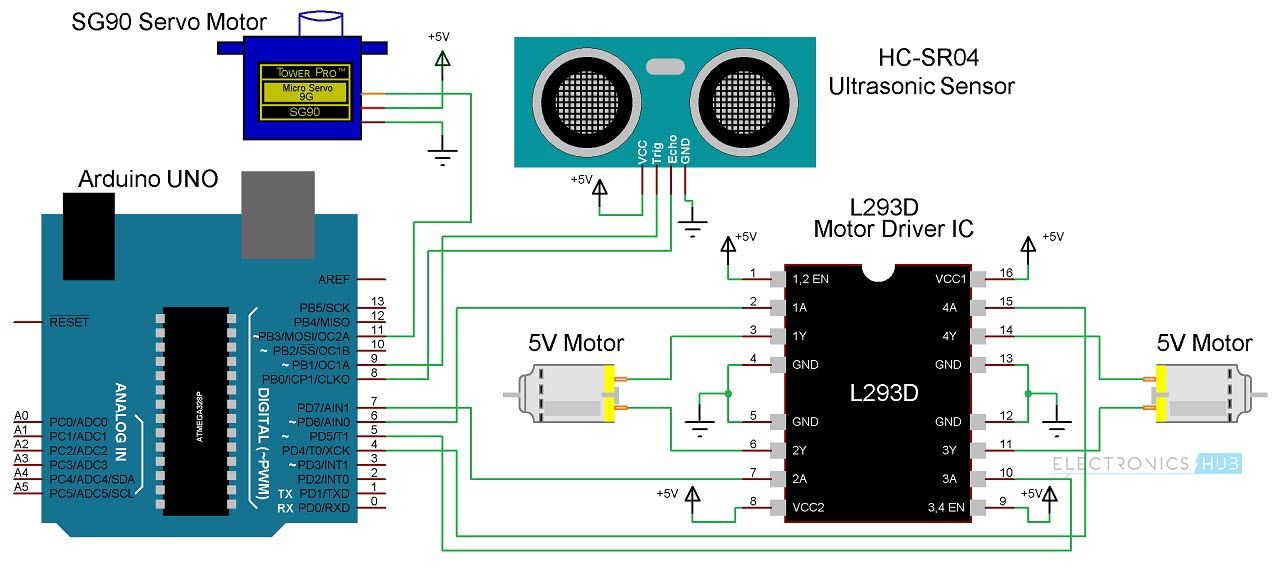
Arduino是机器人的主要处理单元。在14个可用的数字I/O引脚中,7个引脚被用于这个项目的设计。
超声波传感器有4个引脚:Vcc、Trig、Echo和Gnd。Vcc和Gnd接Arduino的+5v和Gnd引脚。trigg (Trigger)分别连接Arduino UNO的第9针和第8针。
利用伺服电机旋转超声传感器,对障碍物进行扫描。它有三个引脚:Control、VCC和GND。伺服控制引脚接Arduino的引脚11,VCC和GND接+5V和GND。
L293D是一个16引脚的IC,引脚1和9是使能引脚。这些引脚连接到+5V。引脚2和7是第一电机的微控制器控制输入。分别连接Arduino的第6和第7个引脚。
同样,引脚10和15是第二电机微控制器的控制输入。连接Arduino的第5和第4个引脚。L293D的4、5、12、13为接地引脚,与Gnd相连。
第一个电机(考虑这是左轮的电机)连接在L293D的引脚3和6上。第二个电机作为右轮电机,分别连接L293D的11和14个引脚。
L293D的第16脚是Vcc1。它连着+5V。第8引脚是Vcc2。这是电机供电电压。这可以连接到4.7V和36V之间的任何地方。在本项目中,L293D接+5V电源引脚8。
注意:电机驱动器的电源,即引脚1(使能1)、8 (VCC2)、9(使能2)和16 (VCC1),应提供单独的电源。
电机驱动板可提供板载5V电压调节器。项目中也使用了类似的方法。
如果上面的避障机器人电路图不清楚,下面的图片可能会有帮助。
工作
在开始项目工作之前,了解超声波传感器的工作原理是很重要的。超声波传感器工作的基本原理如下:
使用外部触发信号,使超声波传感器上的Trig引脚至少为10 μ s的逻辑高。从发射机模块发出一个音爆。它由8个40KHz的脉冲组成。
信号在接触到表面后返回,接收器检测到这个信号。Echo引脚从发送信号和接收信号的时间起就是高的。这个时间可以通过适当的计算转换为距离。
本课题的目的是利用超声波传感器和Arduino实现一个避障机器人。所有的连接都按照电路图进行。项目的工作解释如下。
当机器人上电时,机器人的两个马达都正常运行,机器人向前移动。在此期间,超声波传感器不断计算机器人与反射面之间的距离。
这些信息由Arduino处理。如果机器人与障碍物之间的距离小于15cm,机器人会停下来,利用伺服电机和超声波传感器左右扫描新的距离。如果左边的距离大于右边的距离,机器人就会准备左转。但首先,它后退了一点,然后激活了左轮马达,以相反的方向。
同理,如果右侧距离大于左侧距离,则机器人准备向右旋转。这个过程会一直持续下去,机器人会一直移动,不会碰到任何障碍物。
请注意
- 由于这个项目是基于Arduino的,所以编程非常简单,修改也很容易。
- 不需要Arduino电机屏蔽。
- 当使用9V电池时,至少需要2个这样的电池为机器人供电。最好使用2节9V电池(一节用于Arduino,超声波传感器,伺服电机,一节用于L293D和电机)。
- 超声波传感器不应直接连接电源,以免影响正常性能。
- 除了超声波传感器,还可以使用红外发射-接收对。
应用程序
- 避障机器人几乎可以应用于所有的移动机器人导航系统。
- 它们可以用于家务工作,如自动真空清洁。
- 它们还可以用于危险的环境,在这些环境中,人类的渗透可能是致命的。
在本文结束时,您了解了如何设计一个避障机器人以及运行该设备的代码。让你惊讶的是,我们还提供了机器人吸尘器,利用防撞和避障传感器。只需点击一下,了解更多关于机器人吸尘器它有惊人的功能。
在此之前,机器人会按照指令向各个方向移动。后来他们才知道,当遇到意想不到的障碍时,它就会陷入困境。所以他们做了一些极端的研究工作,并推出了避障Arduino机器人。
你开始了解它的应用、工作原理,以及需要组装的硬件部件。你已经尝试了很多次,但是没有得到结果,或者想从其他来源得到。然后Arduino机器人套件是给你的。
这些工具包是一个伟大的解决方案,初学者和工程师建立Arduino和机器人的知识,通过设计酷的项目。它有一个手册来指导组装过程,工作原理和项目设计。
阅读全文了解更多Arduino机器人套件。Arduino机器人套件
相关文章:

32的反应
如果我能拿到这个项目的书面报告,我会很高兴的。我觉得这很有趣,我想开始做这件事。如果我能得到这些材料,我会很高兴的。
由于预期。
我所有的线路都对了,两个马达都倒了
如果没有正确的编码,它就无法工作
你有它的代码吗?
当机器人开始工作后停止。如何阻止机器人运动,当它开始运动
机器人没有停下来。只有断开电源才能停止它。
您可以包括一个蓝牙模块
一切都如你所说,但是马达根本不旋转
所有的连接都没有旋转吗
你们没有成本分析吗?
难道只有机器人车辆的设计可以单独使用超声波传感器吗?
你能告诉我你用什么程序来写电路图吗?
我们正在使用Proteus。
嗨,我在哪里可以找到这个项目的代码源代码?
谢谢
有人知道这个的密码吗?
这样做的动机是什么?
我能用普通直流电机代替齿轮传动电机吗?
是的。你可以。
我的IC在短时间内变得非常热,我使用9v电池。如果我使用5V,那么它不会移动
什么IC会变热?微控制器还是电机驱动器?
我们想要的代码
这与现有的项目有什么不同
让他们的斗争
代码在哪里?
想要thé代码请!!
你能发送这个项目的代码吗?
如果我能拿到这个项目的报告,我会很高兴的。我觉得这很有趣,我想开始做这件事。如果我能得到这些材料,我会很高兴的。
谢谢你
为什么我想让智能手机控制与避障汽车使用节点,请帮助我
避障车辆如何指示备电??
避障机器人车如何指示电池备电?
能告诉我这个的密码吗?我是一个初学者,我不能写一个代码
你能帮我一下吗?