在这个项目中,我将使用Arduino Uno和HC-SR04超声传感器设计一个简单的Arduino汽车反向停车传感器电路。该基于Arduino的汽车反向传感器可用于自动导航,机器人范围和其他相关应用程序。
大纲
Arduino汽车反向停车传感器的概述
在拥挤的停车场和微小的空间中停车是一项繁琐的工作,重要的是,您在倒车时必须非常小心,以免损坏汽车(您的汽车或邻近的汽车)。
几乎所有现代汽车都配备了反向停车传感器,这些传感器会在汽车换档和哔哔声以可变速度的情况下被激活,具体取决于汽车和最接近的障碍物之间的距离。
在汽车中配备的反向停车传感器基本上是超声波接近传感器,即他们使用超声波传感器来测量汽车与物体之间的距离,并警告驾驶员,如果汽车太近。
在这个项目中,我在Arduino Uno和非常著名的HC-SR04超声波传感器的帮助下建造了一个简单的汽车反向停车传感器的原型。
尽管该系统可以在涉及机器人,自动驾驶汽车等的几个DIY项目中实施,但我不建议它实际在您的汽车中实施(如果您的汽车尚未配备一辆)。
输出视频
电路原理图
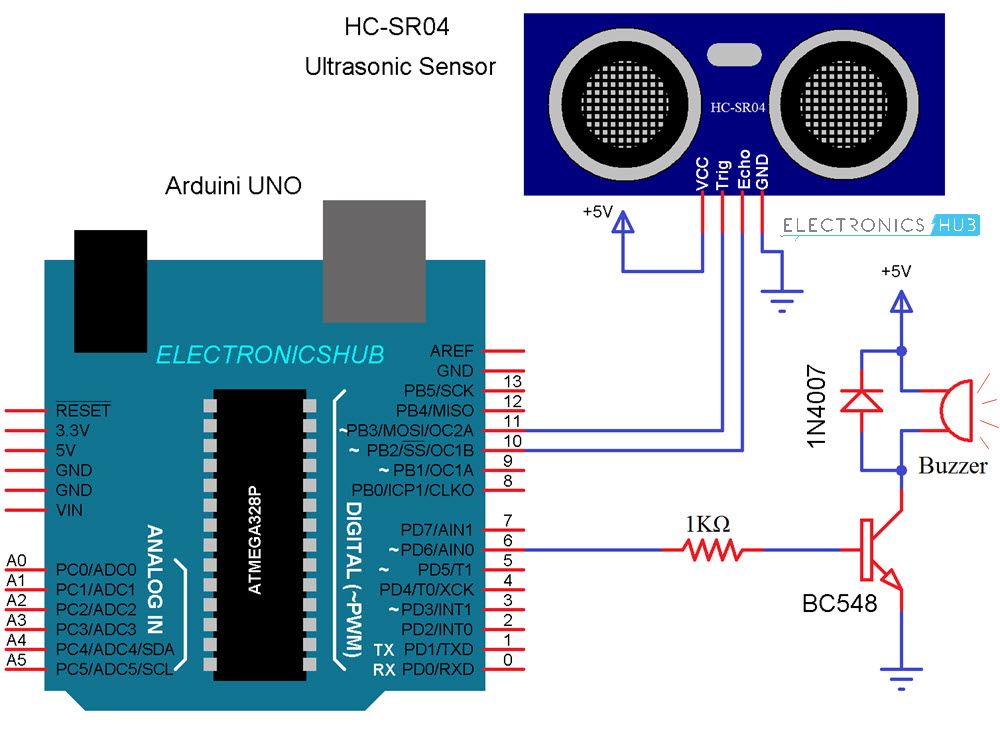
下图中给出了Arduino汽车反向停车传感器电路的电路图。
需要组件
- Arduino uno [在这里买这是给予的
- HC-SR04超声传感器
- BC548 NPN晶体管(可以使用任何NPN晶体管)
- 5V蜂鸣器
- 1N4007 PN连接二极管
- 1KΩ电阻(1/4瓦)
- 迷你面包板
- 连接电线
- 5V电源
电路原理
如前所述,超声波传感器是负责测量距离的主单元(组件)。Arduino Uno充当控制超声传感器,计算距离并激活蜂鸣器的主要控制单元。
电路的原理如下:超声传感器发送声脉冲,而Arduino测量每个反射信号的间隔。基于此时间间隔,然后Arduino计算对象的距离。
然后,如果传感器和对象之间的距离比某个范围少,则Arduino会激活蜂鸣器。
Arduino汽车反向停车传感器电路的设计
Arduino汽车反向停车传感器电路的设计非常简单。从超声传感器开始,它具有4个销钉:VCC,Trig,Echo和GND。
VCC和GND分别连接到电源的 +5V和GND,而TRIG和ECHO分别连接到Arduino的数字I/O销11和10。
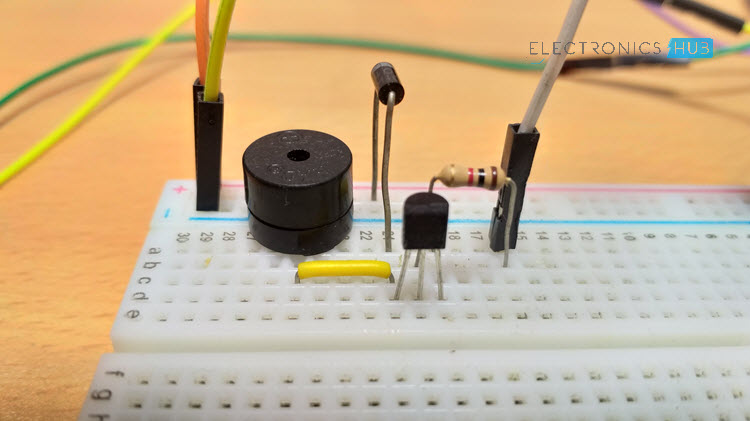
即使此处使用的蜂鸣器是5V蜂鸣器,我还是决定将驱动电路用于由NPN晶体管组成的蜂鸣器。我已经将BC548与1kΩ电阻(用于基座)一起驱动蜂鸣器。
代码
该项目的Arduino代码如下。
代码说明
代码非常简单,如果遵循我们的便携式超声范围仪表项目,然后您也可以轻松理解此代码。
根据HC-SR04超声传感器的数据表,其工作如下:
触发引脚应高至少10µs。
之后,超声波传感器自动发送8个40kHz频率的声脉冲。
通过在回声引脚上读取高位来计算此和反射信号之间的时间。
距离可以计算为时间(回声较高) *声音的速度(340m / s) / 2。
使用代码中的相同原理,首先使用以下代码行将TRIG高10µs。
DigitalWrite(Trigpin,低);
延迟微秒(2);
DigitalWrite(Trigpin,高);
延迟微秒(10);
DigitalWrite(Trigpin,低);
然后,计算使用Arduino的脉搏蛋白函数的回声引脚高的时间。
最后,使用代码中的以下行计算以厘米为单位的距离。
在职的
我认为该项目的工作现在可能已经很清楚了。当电路打开电路时,Arduino将开始测量超声传感器前面的物体的距离。
如果计算的距离小于100厘米,则Arduino激活蜂鸣器。如果您有兴趣,可以修改代码以蜂鸣器蜂鸣器,以使哔哔声的强度随距离的减少而增加(例如在真实的汽车中)。
申请
可以使用Arduino汽车逆转停车传感器电路:
- 自动驾驶汽车
- 避免机器人的障碍
- 距离测量
- 接近检测
- 人类检测
- 无人机,无人机和直升机

2个回应
你好呀。
可以将其连接到您的汽车中的12V USB端口吗?ATMEGA328P芯片的绝对最大输入电压是多少?
谢谢。
当然,微控制器的工作电压为5V,但输入电压可以为6-20V